如何获取旋转平面的矩阵,使其朝向新的法线向量?
下图描述了问题:
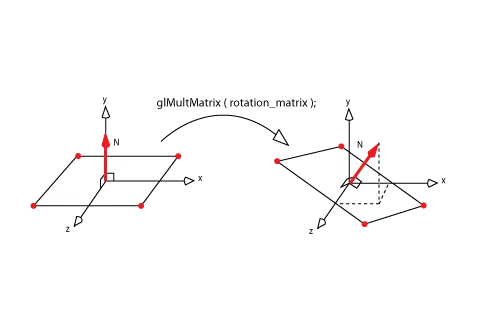
给定旧的常数N和新的常数N',您可以通过以下方式获得旋转:
RotationAxis = cross(N, N')
RotationAngle = arccos(dot(N, N') / (|N| * |N'|))
在哪里?
cross(x, y)是向量x和y的叉积dot(x, y)是向量x和y的点积|x|是向量x的长度这将使旧法线以最短的方式旋转到新法线上。
注释
RotationAngle将以弧度表示(如果arccos返回弧度,就像大多数实现一样)arccos是余弦函数的反函数。它是必要的,因为dot(N,N') = |N| * |N'| * cos(RotationAngle)其中RotationAngle是向量之间的角度。RotationAxis未归一化(|N| * |N'|)变得不必要(事实上,如果N已经被归一化,就可以在乘积中省去|N| ,如果N'被标准化,则省略|N'| )N' = -N,则此方法将失败(因为有无限多个最短路径)它是如何工作的?
首先可以观察到,两个法线将始终定义出至少一个包含它们的平面。将它们分开的最小角度也将在该平面内测量。
所以RotationAxis向量将是包围N和N'的平面的法线,而RotationAngle是前面提到的两者之间的最小角度。
因此,通过在RotationAxis周围以RotationAngle旋转,旧法线N会沿着平面被旋转,在最短路径上朝向N'。