使用opencv将曲线规范化成矩形
3
{kind=link}
{kind=link}
{kind=link}
- omarec14
6
“规范化的结果是指所有形状都是具有恒定宽度的统一矩形形状。”这并不是一个有用的定义,因为任何图像都可以符合这个定义:一张图片是由像素构成的,而单个像素是一个矩形形状。” - Julien
@Julien 我指的是图像中检测到的对象作为结果。 - omarec14
我的评论仍然适用。任何检测到的形状,无论多么扭曲,最终都是由矩形像素组成的。换句话说,你的问题定义不清。你需要确定你的“矩形”的“比例”或“粒度”。 - Julien
1@Julien,图像由矩形像素组成是常识。我的问题仅在于消除所有抖动并获得线条形状的对象。但是,我将编辑问题以更清楚地阐明。 - omarec14
再次强调,“wiggle”可能在你的脑海中有明确的定义,但它是一个模糊的概念。你目前的定义并不排除我告诉你你的图像不是“wiggly”的可能性。因此,如果这个答案不能满足你,你需要想出一个明确定义你想要的东西的定义。 - Julien
1@Julien 图片已经添加以澄清。 - omarec14
1个回答
1
为了从图像中提取线条,您可以在阈值化后过滤水平和垂直线条,并通过中心绘制具有恒定宽度的矩形,然后删除交叉点周围的小对象。
import cv2
import numpy as np
from skimage.io import imread
from skimage.morphology import remove_small_objects
rgb = imread('https://istack.dev59.com/QPz8W.webp')
# convert to HSV for thresholding
hsv = cv2.cvtColor(rgb, cv2.COLOR_RGB2HSV)
# threshold hue channel for purple tubes, value channel for blue tubes
thresh_hue = cv2.threshold(hsv[..., 0], 127, 255, cv2.THRESH_BINARY)[1]
thresh_val = cv2.threshold(hsv[..., 2], 200, 255, cv2.THRESH_BINARY)[1]
# combine purple tubes with blue tubes
thresh = thresh_hue | thresh_val
cv2.imwrite('threshold_result.png', thresh)
# morphologically close the gaps between purple and blue tubes
thresh = cv2.morphologyEx(thresh, cv2.MORPH_CLOSE, np.ones((5, 5), np.uint8))
cv2.imwrite('closing_result.png', thresh)
# morphological opening with horizontal and vertical kernels
h_kernel = np.zeros((11, 11), dtype=np.uint8)
h_kernel[5, :] = 1
v_kernel = np.zeros((11, 11), dtype=np.uint8)
v_kernel[:, 5] = 1
h_tubes = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, h_kernel, iterations=6)
v_tubes = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, v_kernel, iterations=7)
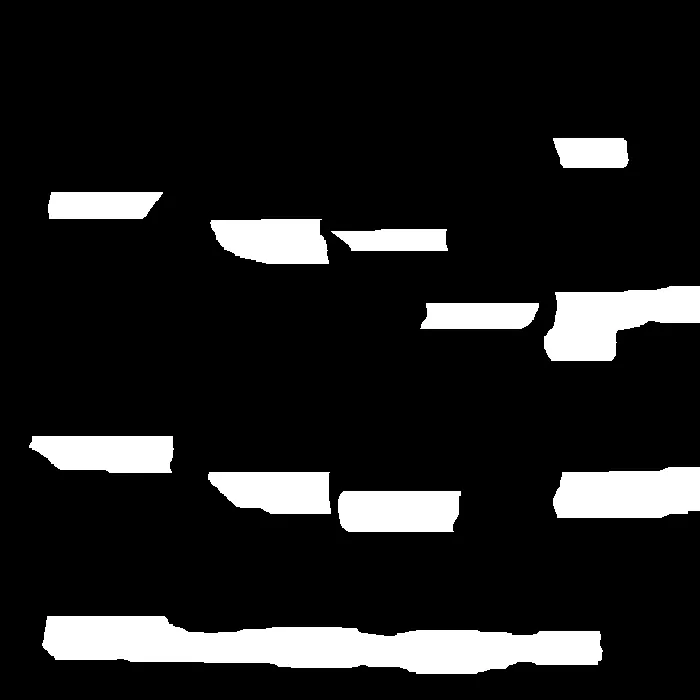
cv2.imwrite('horizontal_tubes.png', h_tubes)
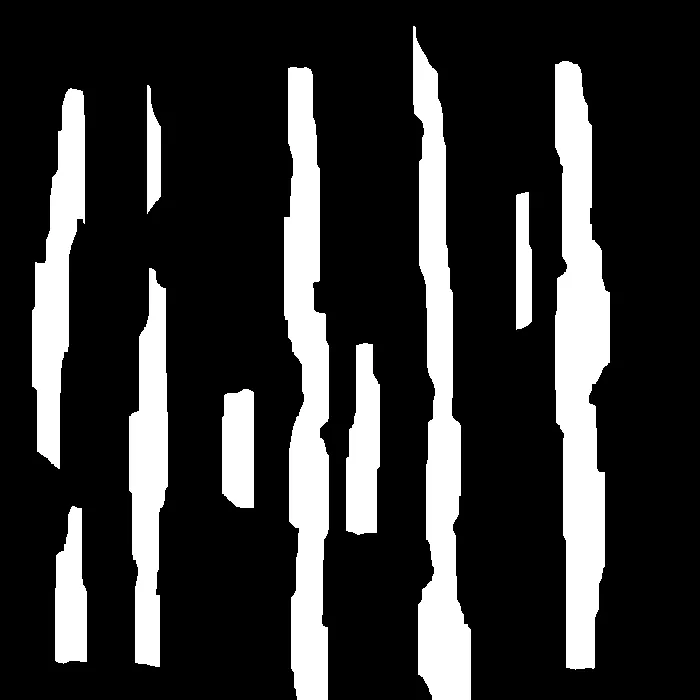
cv2.imwrite('vertical_tubes.png', v_tubes)
# find contours and draw rectangles with constant widths through centers
h_contours = cv2.findContours(h_tubes, cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)[0]
h_lines = np.zeros(thresh.shape, np.uint8)
for cnt in h_contours:
x, y, w, h = cv2.boundingRect(cnt)
y += int(np.floor(h / 2) - 4)
cv2.rectangle(h_lines, (x, y), (x + w, y + 8), 255, -1)
v_contours = cv2.findContours(v_tubes, cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)[0]
v_lines = np.zeros(thresh.shape, np.uint8)
for cnt in v_contours:
x, y, w, h = cv2.boundingRect(cnt)
x += int(np.floor(w / 2) - 4)
cv2.rectangle(v_lines, (x, y), (x + 8, y + h), 255, -1)
# combine horizontal and vertical lines
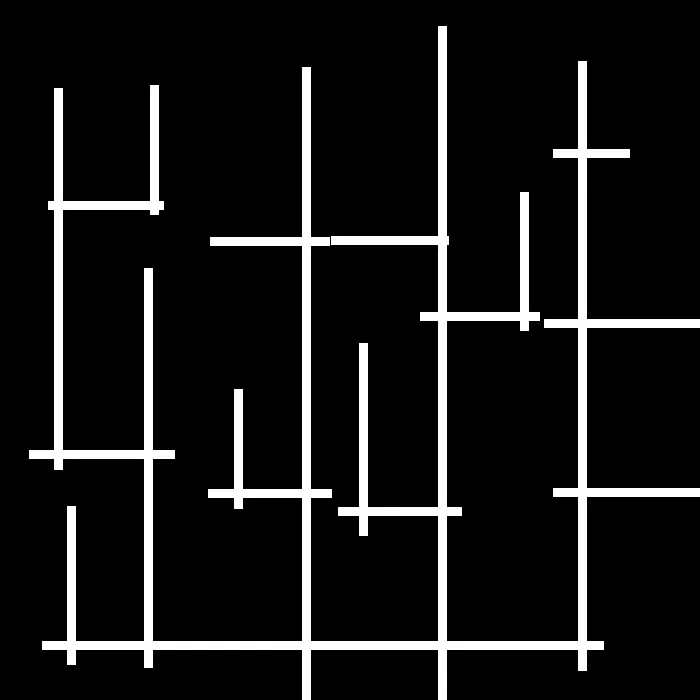
all_lines = h_lines | v_lines
cv2.imwrite('all_lines.png', all_lines)
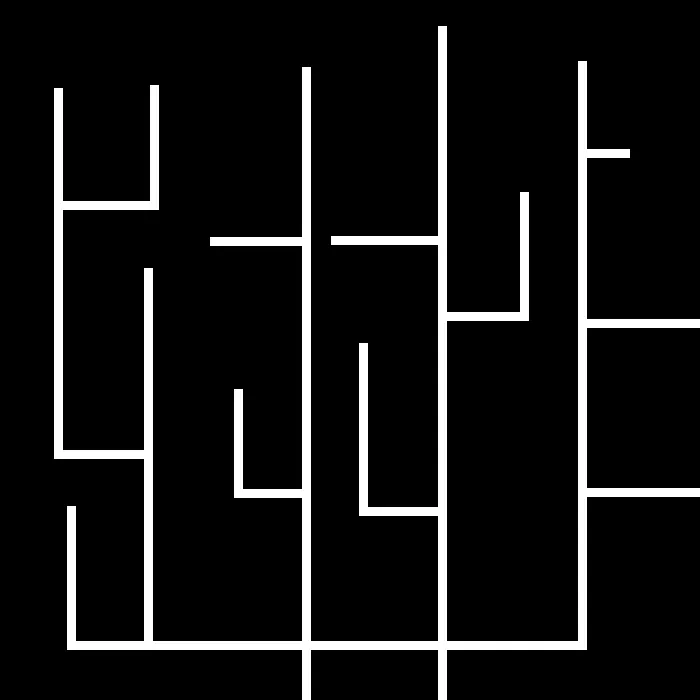
# remove small objects around the intersections
xor = np.bool8(h_lines ^ v_lines)
removed = xor ^ remove_small_objects(xor, 350)
result = all_lines & ~removed * 255
cv2.imwrite('result.png', result)
threshold_result.png

closing_result.png

horizontal_tubes.png
vertical_tubes.png
all_lines.png
result.png
- Jonathan Feenstra
网页内容由stack overflow 提供, 点击上面的可以查看英文原文,
原文链接
原文链接