我有两个分离的三维数据点向量,表示曲线,并在matplotlib中将其作为散点数据绘制在3D图中。
这两个向量都从原点开始,并且长度都为单位长度。这些曲线彼此相似,但通常两条曲线之间存在旋转(为了测试目的,我实际上使用一条曲线并应用旋转矩阵来创建第二条曲线)。
我想要对齐这两条曲线,使它们在3D空间中排成一条直线,例如旋转曲线B,使其起始点和终止点与曲线A对齐。我一直在尝试通过将最后一个点减去第一个点,得到一个方向向量来代表每条曲线起点到终点的直线,将它们转换为单位向量,然后计算叉积和点积,并使用在这个答案中概述的方法 (https://math.stackexchange.com/a/476311/357495) 来计算旋转矩阵。
然而,当我这样做时,计算出来的旋转矩阵是错误的,我不知道为什么?
我的代码如下(我正在使用Python 2.7):
# curve_1, curve_2 are arrays of 3D points, of the same length (both start at the origin)
curve_vec_1 = (curve_1[0] - curve_1[-1]).reshape(3,1)
curve_vec_2 = (curve_2[index][0] - curve_2[index][-1]).reshape(3,1)
a,b = (curve_vec_1/ np.linalg.norm(curve_vec_1)).reshape(3), (curve_vec_2/ np.linalg.norm(curve_vec_2)).reshape(3)
v = np.cross(a,b)
c = np.dot(a,b)
s = np.linalg.norm(v)
I = np.identity(3)
vXStr = '{} {} {}; {} {} {}; {} {} {}'.format(0, -v[2], v[1], v[2], 0, -v[0], -v[1], v[0], 0)
k = np.matrix(vXStr)
r = I + k + np.square(k) * ((1 -c)/(s**2))
for i in xrange(item.shape[0]):
item[i] = (np.dot(r, item[i]).reshape(3,1)).reshape(3)
在我的测试案例中,曲线2只是应用了以下旋转矩阵的曲线1:
[[1 0 0 ]
[ 0 0.5 0.866]
[ 0 -0.866 0.5 ]]
(只是绕x轴旋转60度)。
由我的代码计算得到的旋转矩阵,以再次将这两个向量对齐:
[[ 1. -0.32264329 0.27572962]
[ 0.53984249 1. -0.35320293]
[-0.20753816 0.64292975 1. ]]
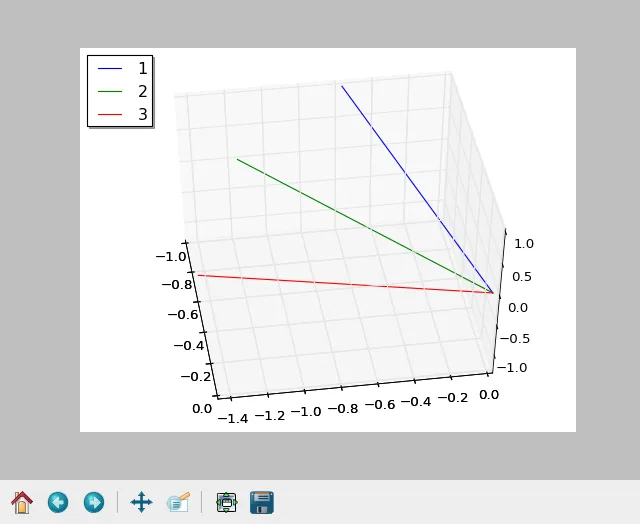
下面是两条原始曲线的方向向量的绘图 (分别为蓝色和绿色的 a 和 b),以及使用计算出的旋转矩阵变换后得到的 b 曲线的结果 (红色)。我正在尝试计算旋转矩阵,将绿色向量与蓝色对齐。