伪代码:
- 开始设备运动更新
- 在后台开始相机预览 ;)
- 从设备中捕获当前的重力读数作为CMAcceleration...一旦你有了重力,就将其存储在本地变量中。
- 然后你必须取出2个向量,并得到它们之间的角度,在这种情况下是设备重力(0,0,-1)和真实重力向量之间的角度...
- 然后我们将theta转换为thetaPrime...一个与CoreMotion参考方向匹配的变换
- 设置一个计时器来进行动画...
- 在动画期间获取motionManager的deviceMotion属性的旋转矩阵的逆。
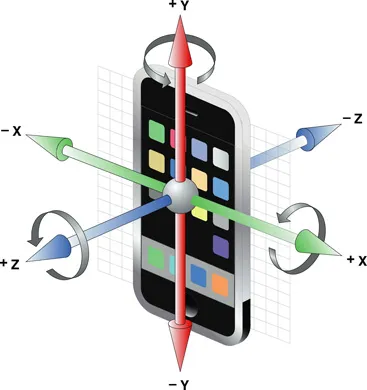
- 按正确的顺序应用变换以反映设备的当前姿态(yaw、pitch、roll在欧拉模式下或设备四元数旋转...基本上是三种不同的说法)
以下是代码:
- (void) initMotionCapture
{
firstGravityReading = NO;
referenceAttitude = nil;
if (motionManager == nil)
{
self.motionManager = [CMMotionManager new];
}
motionManager.deviceMotionUpdateInterval = 0.01;
self.gravityTimer = [NSTimer scheduledTimerWithTimeInterval:1/60.0
target:self
selector:@selector(getFirstGravityReading)
userInfo:nil repeats:YES];
}
- (void) getFirstGravityReading
{
CMAcceleration currentGravity;
CMDeviceMotion *dm = motionManager.deviceMotion;
referenceAttitude = dm.attitude;
currentGravity = dm.gravity;
[motionManager startDeviceMotionUpdates];
if (currentGravity.x !=0 &&
currentGravity.y !=0 && currentGravity.z !=0)
{
NSLog(@"Gravity = (%f,%f,%f)",
currentGravity.x, currentGravity.y, currentGravity.z);
firstGravityReading = YES;
[gravityTimer invalidate];
self.gravityTimer = nil;
[self setupCompass];
}
}
- (void) setupCompass
{
//Draw your cube... I am using a quartz 3D perspective hack!
CATransform3D initialTransform = perspectiveTransformedLayer.sublayerTransform;
initialTransform.m34 = 1.0/-10000;
//HERE IS WHAT YOU GUYS NEED... the vector equations!
NSLog(@"Gravity = (%f,%f,%f)",
currentGravity.x, currentGravity.y, currentGravity.z);
//we have current gravity vector and our device gravity vector of (0, 0, -1)
// get the dot product
float dotProduct = currentGravity.x*0 +
currentGravity.y*0 +
currentGravity.z*-1;
float innerMagnitudeProduct = currentGravity.x*currentGravity.x +
currentGravity.y + currentGravity.y +
currentGravity.z*currentGravity.z;
float magnitudeCurrentGravity = sqrt(innerMagnitudeProduct);
float magnitudeDeviceVector = 1; //since (0,0,-1) computes to: 0*0 + 0*0 + -1*-1 = 1
thetaOffset = acos(dotProduct/(magnitudeCurrentGravity*magnitudeDeviceVector));
NSLog(@"theta(degrees) = %f", thetaOffset*180.0/M_PI);
//Now we have the device angle to the gravity vector (0,0,-1)
//We must transform these coordinates to match our
//device's attitude by transforming to theta prime
float theta_deg = thetaOffset*180.0/M_PI;
float thetaPrime_deg = -theta_deg + 90; // ThetaPrime = -Theta + 90 <==> y=mx+b
NSLog(@"thetaPrime(degrees) = %f", thetaOffset*180.0/M_PI);
deviceOffsetRotation =
CATransform3DMakeRotation((thetaPrime_deg) * M_PI / 180.0, 1, 0, 0);
initialTransform = CATransform3DConcat(deviceOffsetRotation, initialTransform);
perspectiveTransformedLayer.sublayerTransform = initialTransform;
self.animationTimer = [NSTimer scheduledTimerWithTimeInterval:1/60.0
target:self
selector:@selector(tick)
userInfo:nil
repeats:YES];
}
- (void) tick
{
CMRotationMatrix rotation;
CMDeviceMotion *deviceMotion = motionManager.deviceMotion;
CMAttitude *attitude = deviceMotion.attitude;
if (referenceAttitude != nil)
{
[attitude multiplyByInverseOfAttitude:referenceAttitude];
}
rotation = attitude.rotationMatrix;
CATransform3D rotationalTransform = perspectiveTransformedLayer.sublayerTransform;
//inverse (or called the transpose) of the attitude.rotationalMatrix
rotationalTransform.m11 = rotation.m11;
rotationalTransform.m12 = rotation.m21;
rotationalTransform.m13 = rotation.m31;
rotationalTransform.m21 = rotation.m12;
rotationalTransform.m22 = rotation.m22;
rotationalTransform.m23 = rotation.m32;
rotationalTransform.m31 = rotation.m13;
rotationalTransform.m32 = rotation.m23;
rotationalTransform.m33 = rotation.m33;
rotationalTransform =
CATransform3DConcat(deviceOffsetRotation, rotationalTransform);
rotationalTransform =
CATransform3DConcat(rotationalTransform,
CATransform3DMakeScale(1.0, -1.0, 1.0));
perspectiveTransformedLayer.sublayerTransform = rotationalTransform;
}