给定一组 4x4位姿矩阵,可以得到相机的欧几里得坐标系位置如下:
4x4位姿矩阵,可以得到相机的欧几里得坐标系位置如下:
当一组位姿按顺序处理时,例如每个位姿都指代某个时间步长中相机的位姿时,旋转和平移分量可以累加如下:
我的问题是如何使用OpenCV或类似工具绘制这些点。对于一个以圆周运动围绕物体的相机,输出图应为圆形,原点位于轨迹起点。
以下是示例: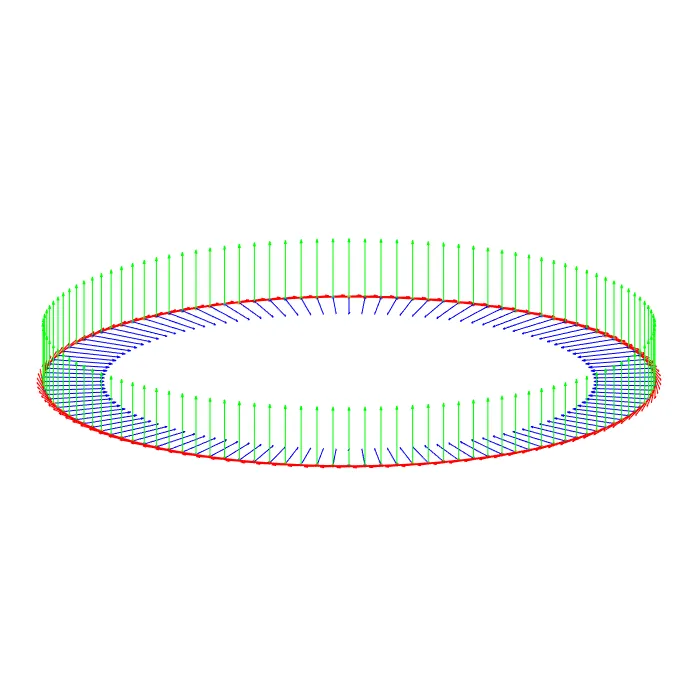 虽然我的问题并不明确要求像上面那样绘制坐标轴,但这将是一个额外的奖励。
虽然我的问题并不明确要求像上面那样绘制坐标轴,但这将是一个额外的奖励。
简而言之:给定一组位姿,我们如何使用常见工具(如OpenCV、VTK、Matplotlib、MATLAB等)生成像上面那样的图。
4x4位姿矩阵,可以得到相机的欧几里得坐标系位置如下:

R是3x3旋转矩阵,t是位姿的平移向量,详见这个问题。当一组位姿按顺序处理时,例如每个位姿都指代某个时间步长中相机的位姿时,旋转和平移分量可以累加如下:

我的问题是如何使用OpenCV或类似工具绘制这些点。对于一个以圆周运动围绕物体的相机,输出图应为圆形,原点位于轨迹起点。
以下是示例:
 虽然我的问题并不明确要求像上面那样绘制坐标轴,但这将是一个额外的奖励。
虽然我的问题并不明确要求像上面那样绘制坐标轴,但这将是一个额外的奖励。简而言之:给定一组位姿,我们如何使用常见工具(如OpenCV、VTK、Matplotlib、MATLAB等)生成像上面那样的图。