假设这个
GLSL体积后向光线跟踪器作为起点。要创建像这样的填充
3D线条:
你需要:
endpoints as spheres
see the add_sphere in the link above.
discs cut at the endpoints
for that we need U,V basis vectors (perpendicular vectors to each other and to line itself). With those we can simply use any 2D circle pixels acquisition and convert them to 3D voxel positions with ease. So if u,v are coordinates in some 2D circle centered at (0,0) then:
x = x0 + u*U.x + v*V.x
y = y0 + u*U.y + v*V.y
z = z0 + u*U.z + v*V.z
(x,y,z) are corresponding to 3D circle voxel coordinate with center (x0,y0,z0). For more info see my C++ glCircle3D implementation.
line body
As wee got all the voxel positions in the disc around x0,y0,z0 endpoint of the line just cast a line from each of it with the same slope as line (x0,y0,z0),(x1,y1,z1) which are the endpoints of your line.
当我在C++中将它们组合在一起时(抱歉,我不会用Python编程),我得到了以下内容:
void volume::add_line(int x0,int y0,int z0,int x1,int y1,int z1,int r,GLuint col)
{
if (!_init) return;
int i,n,x,y,z,cx,cy,cz,dx,dy,dz,kx,ky,kz;
add_sphere(x0,y0,z0,r,col);
add_sphere(x1,y1,z1,r,col);
kx=0; dx=x1-x0; if (dx>0) kx=+1; if (dx<0) { kx=-1; dx=-dx; } dx++; n=dx;
ky=0; dy=y1-y0; if (dy>0) ky=+1; if (dy<0) { ky=-1; dy=-dy; } dy++; if (n<dy) n=dy;
kz=0; dz=z1-z0; if (dz>0) kz=+1; if (dz<0) { kz=-1; dz=-dz; } dz++; if (n<dz) n=dz;
double U[3],V[3],N[3]={x1-x0,y1-y0,z1-z0},u,v,rr=r*r;
vector_one(N,N);
vector_ld(U,1.0,0.0,0.0); if (fabs(vector_mul(U,N))>=0.75) vector_ld(U,0.0,1.0,0.0);
vector_mul(U,U,N);
vector_mul(V,U,N);
vector_one(U,U);
vector_one(V,V);
for (u=-r;u<=+r;u++)
for (v=-r;v<=+r;v++)
if (u*u+v*v<=rr)
{
x=x0+double((u*U[0])+(v*V[0]));
y=y0+double((u*U[1])+(v*V[1]));
z=z0+double((u*U[2])+(v*V[2]));
for (cx=cy=cz=n,i=0;i<n;i++)
{
if ((x>=0)&&(x<size)&&(y>=0)&&(y<size)&&(z>=0)&&(z<size)) data[z][y][x]=col;
cx-=dx; if (cx<=0) { cx+=n; x+=kx; }
cy-=dy; if (cy<=0) { cy+=n; y+=ky; }
cz-=dz; if (cz<=0) { cz+=n; z+=kz; }
}
}
}
vector_xxx 函数仅涉及我的 3D 向量数学,只使用点积、叉积和单位大小标准化,易于实现。您可以在此处查看它们:
还有一些可以改进的地方,例如球体可以是半球体,并且它们的生成可以与圆盘合并...因为法线和未偏移的 3D 球面坐标之间的点积要么为正/零/负,从而区分终点半球体和圆盘...这也将完全消除对
U,V 的需求。
此外,根据所使用的硬件和环境,还可以有更快的方法,例如基于距离线的(基于
距离的 BBOX 填充)分析方法,如果快速向量数学结合大规模并行处理(如在 GPU 上)。
在我的引擎中进行了一些调整(添加缩放并处理了一些精度问题),我得到了以下结果:
128x128x128 的体积在此处初始化:
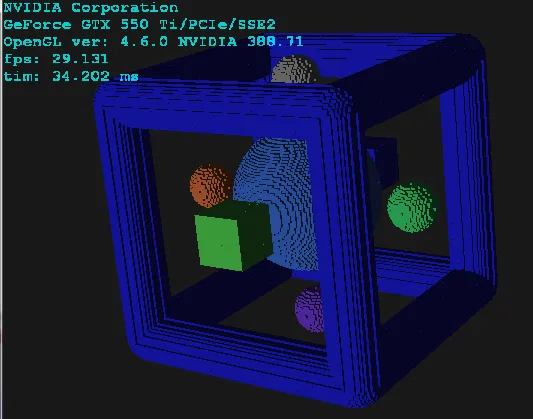
vol.gl_init();
vol.beg();
int r,a,b,c;
r=10.0; a=r+1; b=vol.size-r-2; c=vol.size>>1;
vol.add_line(a,a,a,b,a,a,r,0x00FF2020);
vol.add_line(a,b,a,b,b,a,r,0x00FF2020);
vol.add_line(a,a,a,a,b,a,r,0x00FF2020);
vol.add_line(b,a,a,b,b,a,r,0x00FF2020);
vol.add_line(a,a,b,b,a,b,r,0x00FF2020);
vol.add_line(a,b,b,b,b,b,r,0x00FF2020);
vol.add_line(a,a,b,a,b,b,r,0x00FF2020);
vol.add_line(b,a,b,b,b,b,r,0x00FF2020);
vol.add_line(a,a,a,a,a,b,r,0x00FF2020);
vol.add_line(a,b,a,a,b,b,r,0x00FF2020);
vol.add_line(b,a,a,b,a,b,r,0x00FF2020);
vol.add_line(b,b,a,b,b,b,r,0x00FF2020);
vol.add_sphere(c,c,c,c>>1,0x00FF8040);
vol.add_sphere(a,c,c,r,0x004080FF);
vol.add_sphere(b,c,c,r,0x0080FF40);
vol.add_sphere(c,a,c,r,0x00FF4080);
vol.add_sphere(c,b,c,r,0x00AAAAAA);
vol.add_box(c,c,a,r,r,r,0x0060FF60);
vol.add_box(c,c,b,r,r,r,0x00FF2020);
vol.end();
R。此外,体积应该被填满。我试着去找你提到的问题,但是找不到。 - user3637203