原问题:
问题
我有一个单位立方体,我想将其变换,使其连接两个点。 我是OpenGL的新手,只了解线性代数的最基本部分。我尝试模仿极坐标类似的东西来连接点。当Z轴和另一个轴发生变化时,我的当前实现不起作用。我还尝试过mat = glm :: lookAt(center,terminal,y_axis);,但没有成功。
代码
这来自于位于schedule_edge_update()中的for循环体。
auto const initial = p1;
auto const terminal = p2;
auto const distance = glm::distance(initial, terminal);
auto const length = distance * 0.5f;
auto const center = (initial + terminal) / 2.f;
auto const rejection = terminal - initial;
auto const delta = glm::normalize(rejection);
auto mat = glm::mat4(1);
// translate
mat = glm::translate(mat, center);
// rotate
auto const phi_hyp = glm::length(glm::vec2(delta.x, delta.z));
if (phi_hyp != 0.0f) {
auto phi = acosf(delta.x / phi_hyp);
mat = glm::rotate(mat, phi, y_axis);
}
auto const theta_hyp = glm::length(glm::vec2(delta.x, delta.y));
if (theta_hyp != 0.0f) {
auto theta = acosf(delta.x / theta_hyp);
theta *= delta.x > 0 ? -1.0f : 1.0f;
mat = glm::rotate(mat, theta, z_axis);
}
// scale
edges->add_matrix(glm::scale(mat, glm::vec3(length, 0.05f, 0.01f)));
当一个矩阵被添加到edges中时,它会被排队缓冲以进行实例渲染。
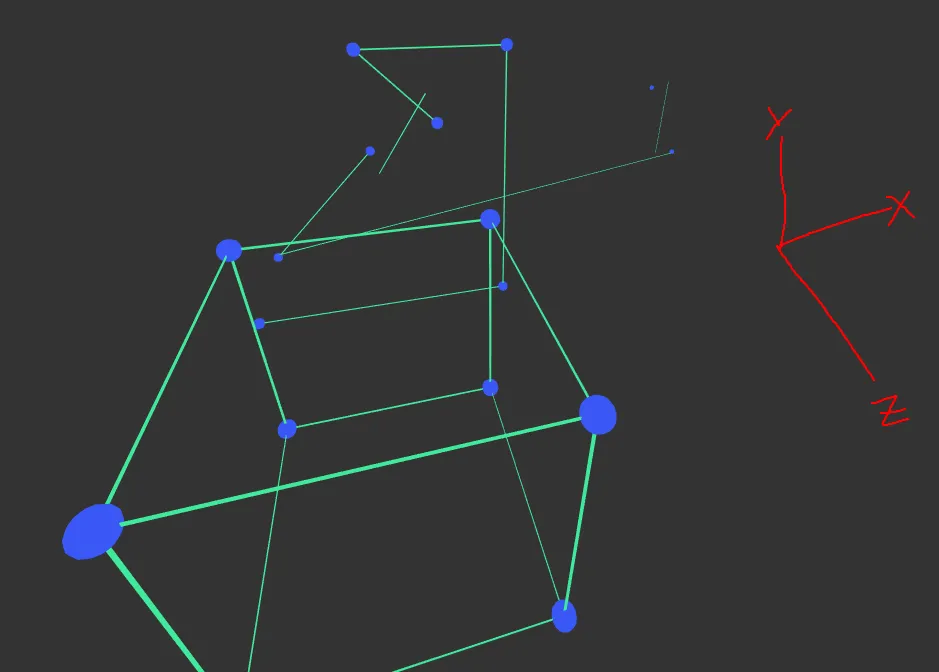
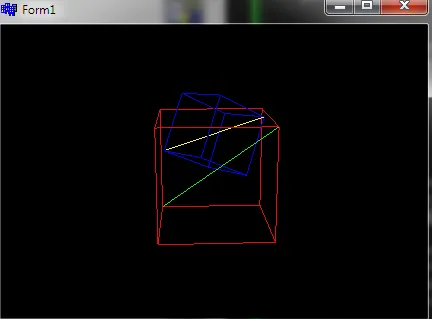
远方
这里是我的测试点和一个我做的大立方体。
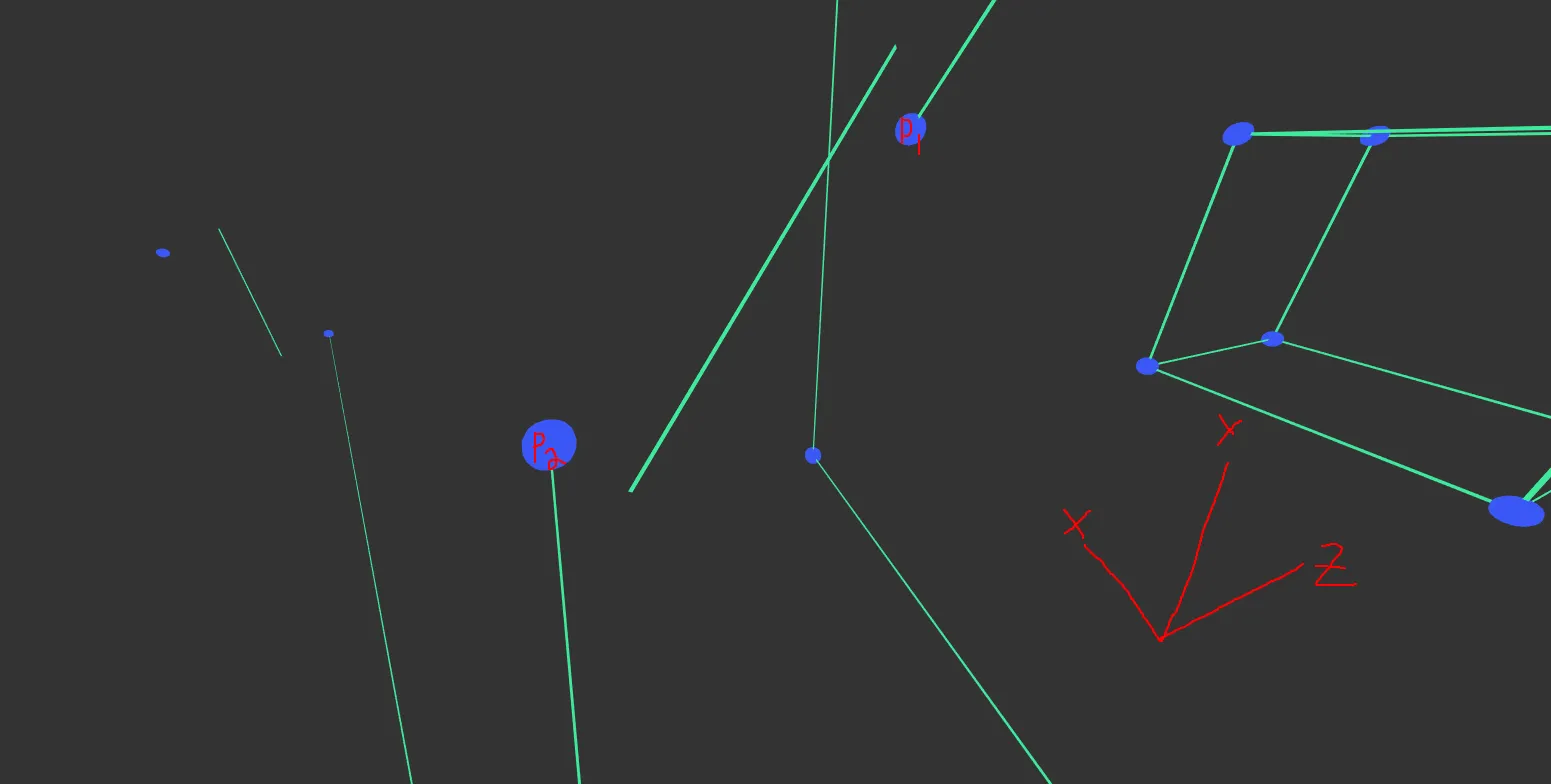
近距离
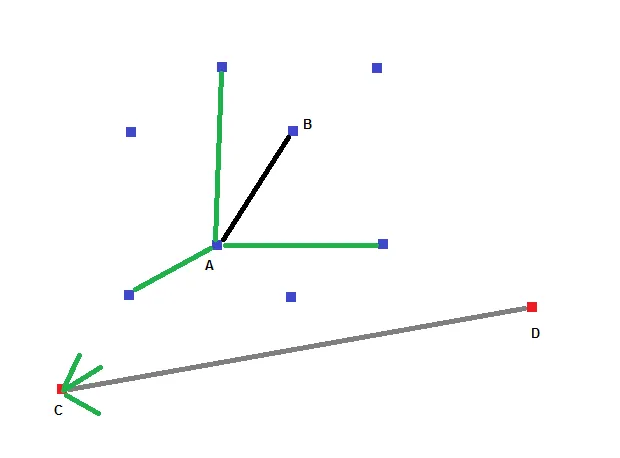
这是一个不起作用的示例。初始点标记为p1,终端点标记为p2。未连接任何点的线应该连接p1和p2。
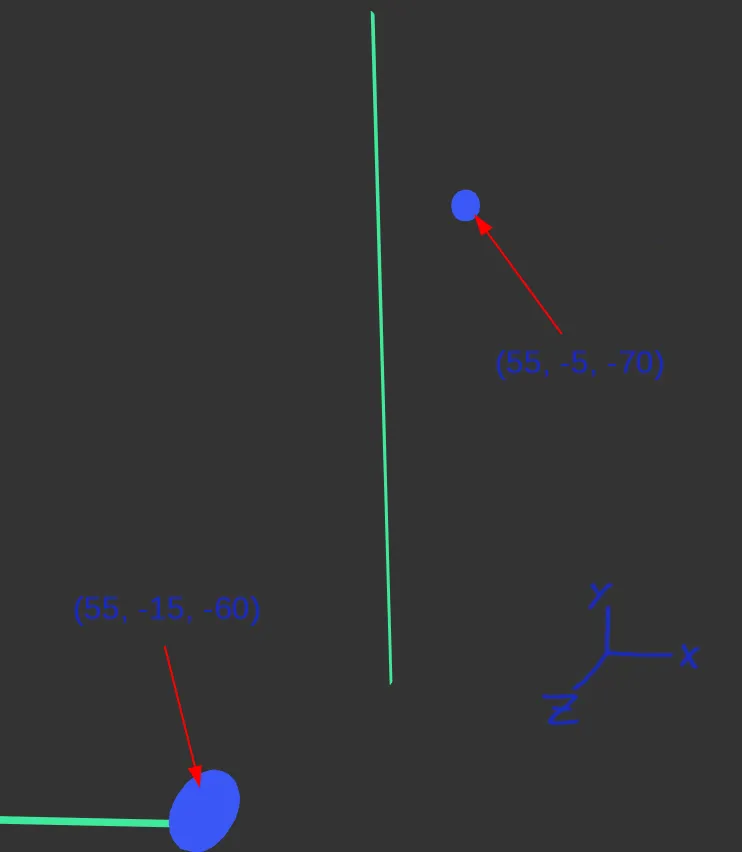
不同的近距离
这是另一个示例,但这个示例有p1和p2的坐标标记。p1和p2在Y和Z上有所变化。然而,我的代码将立方体(在平移后)绕y轴旋转90度,然后对其进行缩放。你可以看出它被旋转了,因为它在一个轴上更宽(旋转之前的y轴)。
完整坐标列表
// Test points
auto const A = glm::vec3(-10.0f, -10.0f, -20.0f);
auto const B = glm::vec3(+10.0f, -10.0f, -20.0f);
auto const C = glm::vec3(+10.0f, +10.0f, -20.0f);
auto const D = glm::vec3(+00.0f, +10.0f, -20.0f);
auto const E = glm::vec3(+05.0f, +05.0f, -20.0f);
auto const F = glm::vec3(+00.0f, +00.0f, -30.0f);
auto const G = glm::vec3(-10.0f, -10.0f, -30.0f);
auto const H = glm::vec3(+55.0f, -15.0f, -60.0f);
auto const I = glm::vec3(+55.0f, -05.0f, -70.0f);
get_nodes().emplace_back(A);
get_nodes().emplace_back(B);
get_nodes().emplace_back(C);
get_nodes().emplace_back(D);
get_nodes().emplace_back(E);
get_nodes().emplace_back(F);
get_nodes().emplace_back(G);
get_nodes().emplace_back(H);
get_nodes().emplace_back(I);
get_edges().emplace_back(A, B);
get_edges().emplace_back(B, C);
get_edges().emplace_back(C, D);
get_edges().emplace_back(D, E);
get_edges().emplace_back(E, F);
get_edges().emplace_back(F, G);
get_edges().emplace_back(G, H);
get_edges().emplace_back(H, I);
// Big cube
auto const C0 = glm::vec3(-5.0f, -5.0f, -5.0f);
auto const C1 = glm::vec3(-5.0f, -5.0f, +5.0f);
auto const C2 = glm::vec3(-5.0f, +5.0f, -5.0f);
auto const C3 = glm::vec3(-5.0f, +5.0f, +5.0f);
auto const C4 = glm::vec3(+5.0f, -5.0f, -5.0f);
auto const C5 = glm::vec3(+5.0f, -5.0f, +5.0f);
auto const C6 = glm::vec3(+5.0f, +5.0f, -5.0f);
auto const C7 = glm::vec3(+5.0f, +5.0f, +5.0f);
get_nodes().emplace_back(C0);
get_nodes().emplace_back(C1);
get_nodes().emplace_back(C2);
get_nodes().emplace_back(C3);
get_nodes().emplace_back(C4);
get_nodes().emplace_back(C5);
get_nodes().emplace_back(C6);
get_nodes().emplace_back(C7);
get_edges().emplace_back(C0, C1);
get_edges().emplace_back(C0, C2);
get_edges().emplace_back(C0, C4);
get_edges().emplace_back(C1, C3);
get_edges().emplace_back(C1, C5);
get_edges().emplace_back(C2, C3);
get_edges().emplace_back(C2, C6);
get_edges().emplace_back(C3, C7);
get_edges().emplace_back(C4, C5);
get_edges().emplace_back(C4, C6);
get_edges().emplace_back(C5, C7);
get_edges().emplace_back(C6, C7);
schedule_node_update();
schedule_edge_update();
使用GLM的Spektre解决方案
代码
auto constexpr A = vec3(-0.5f, 0.0f, 0.0f);
auto constexpr B = vec3(+0.5f, 0.0f, 0.0f);
auto const C = p1;
auto const D = p2;
auto M = mat4(1.0f);
// Translate
auto const center = 0.5 * (C + D);
M = translate(M, center);
// Rotate
auto constexpr p = B - A;
auto const q = D - C;
auto const n = cross(p, q);
if (n != vec3()) {
auto const a = angle(normalize(p), normalize(q));
M = rotate(M, a, n);
}
// Scale
auto constexpr thickness = 0.05f;
M = scale(M, vec3(0.5f * distance(C, D), thickness, thickness));
edges->add_matrix(M);
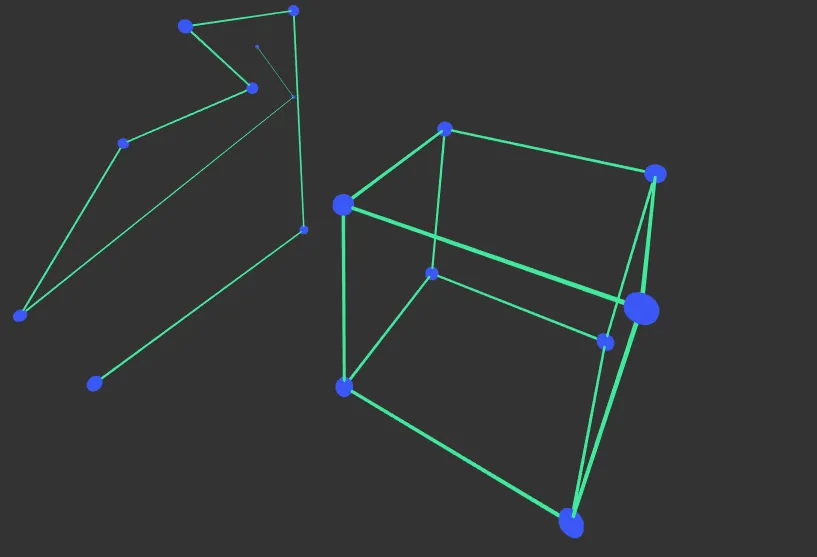
成功的结果
(0,0,0)为中心,边长为1或2或2.(0,0,0)是一个对角点,(1,1,1)是另一个对角点?你的图片表明是后者。 - Spektre