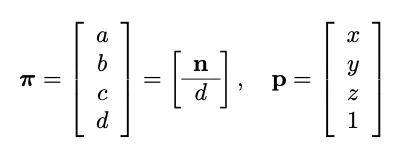
我有一个由法向量(n)和距离(d)(从原点)定义的平面。我想将它转换为一个新的系统。
长方法如下:
1)将距离(d)与法向量(n)相乘,得到一个向量(p)
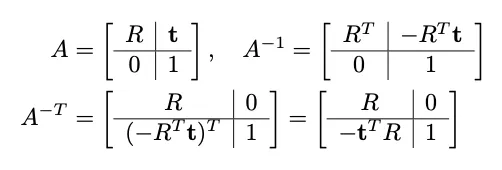
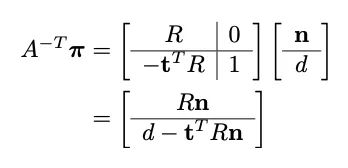
2)旋转(R)并平移(v)向量(p),得到(p')
3)对(p')进行归一化,得到法向量
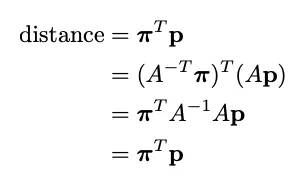
4)使用另一种算法找到新平面与原点之间的最小距离(d')
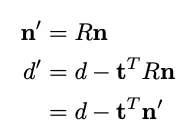
我没有尝试过这个方法,但我认为它应该可以工作。 问题: 难道没有更快的方法来得到n'和d'吗? 如果平移(v)为0,则可以跳过步骤4)。但如果不是0呢?有没有更简单的方法得到新的d'?
我没有尝试过这个方法,但我认为它应该可以工作。 问题: 难道没有更快的方法来得到n'和d'吗? 如果平移(v)为0,则可以跳过步骤4)。但如果不是0呢?有没有更简单的方法得到新的d'?