我已经在我的测试应用程序中成功实现了 OpenCV 的方块检测示例,但现在需要过滤输出,因为它看起来很凌乱 - 或者是我的代码有误?
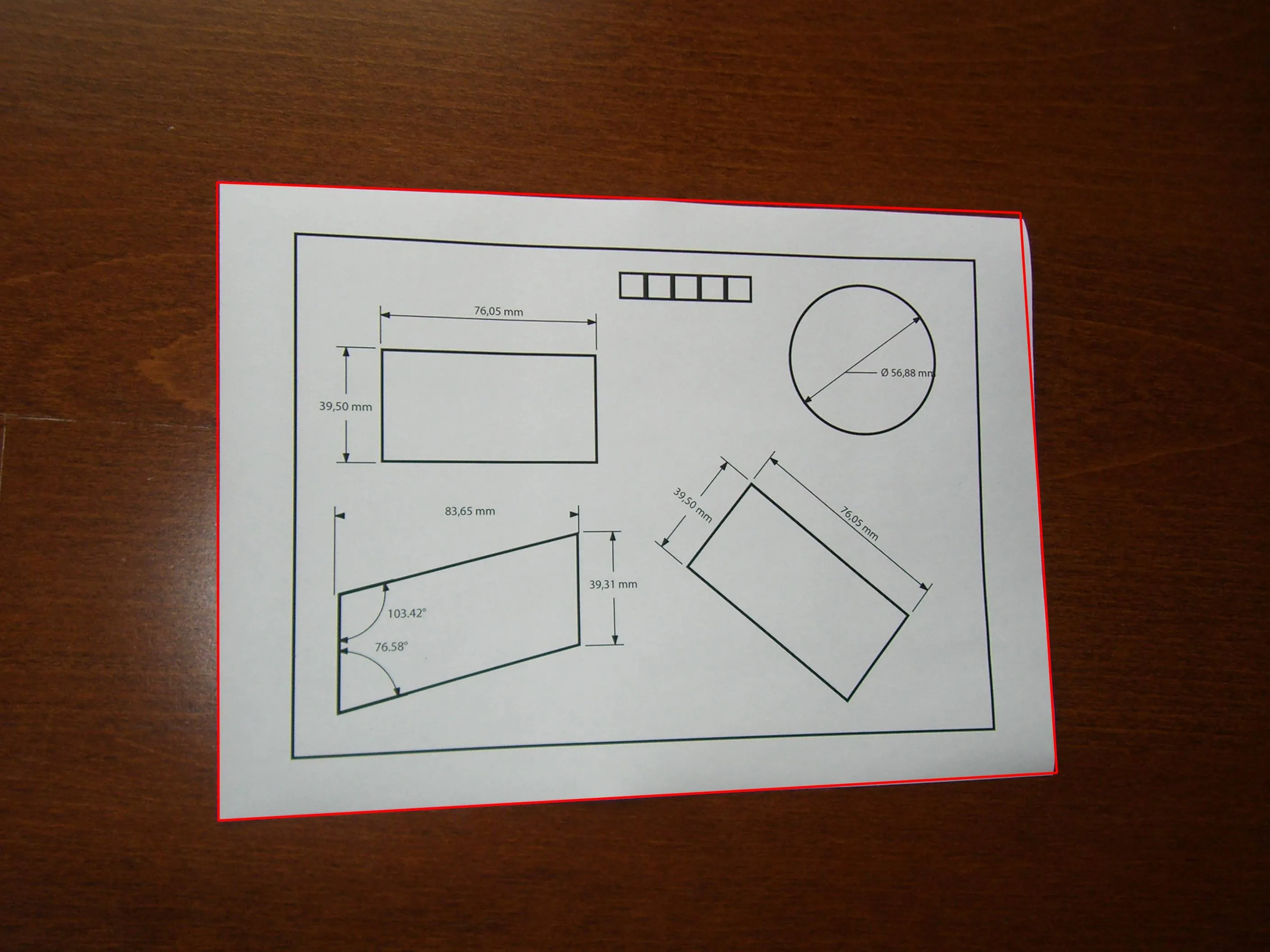
我对纸张的四个角点感兴趣,以进行倾斜校正(例如 这样 ),并进行进一步处理...
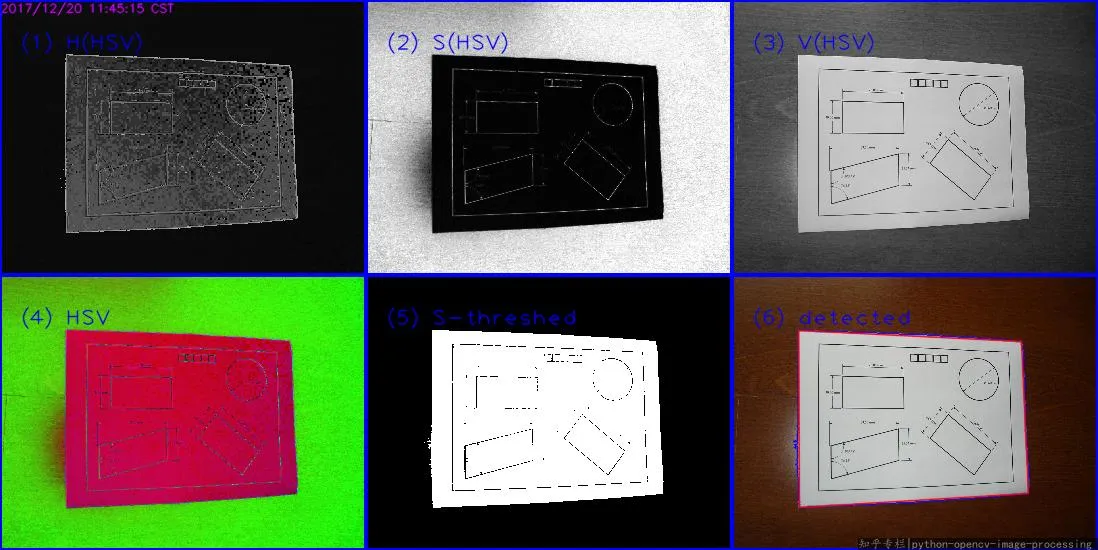
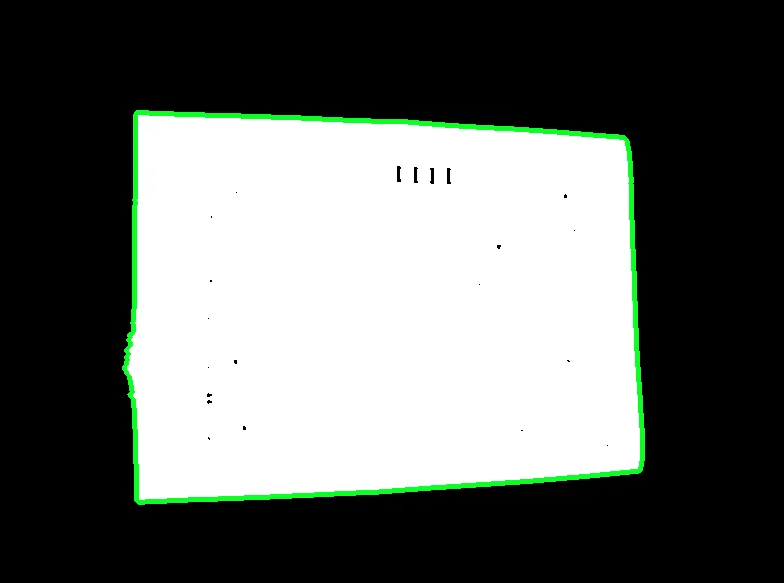
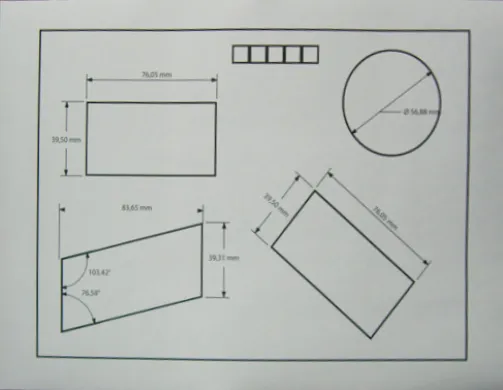
输入和输出:
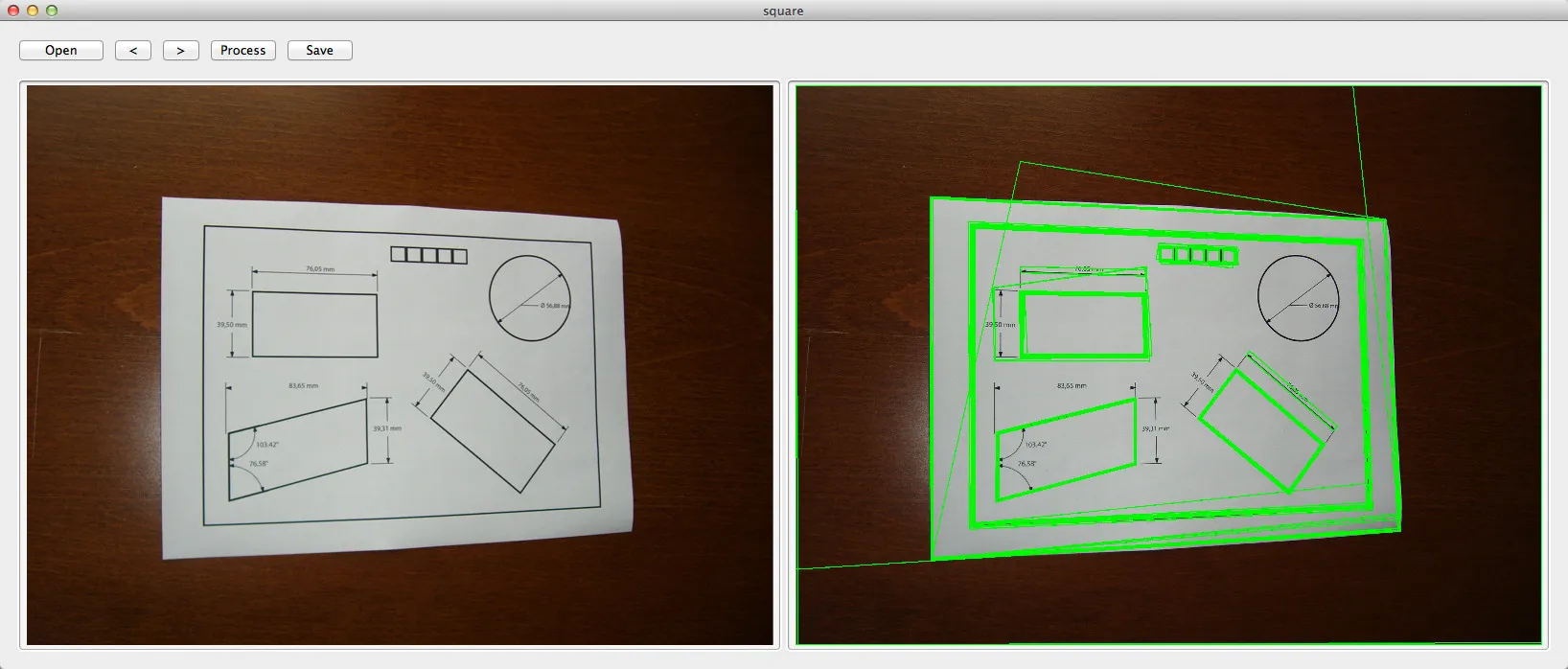
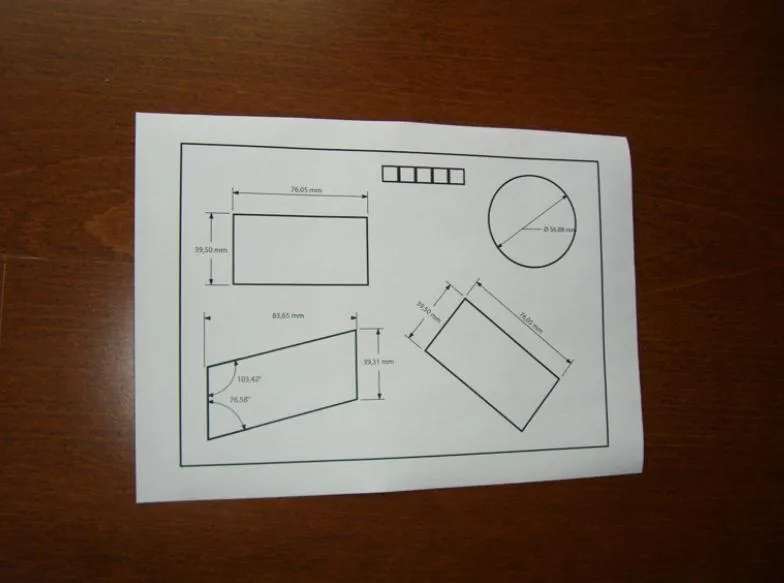
原始图像:
代码:
double angle( cv::Point pt1, cv::Point pt2, cv::Point pt0 ) {
double dx1 = pt1.x - pt0.x;
double dy1 = pt1.y - pt0.y;
double dx2 = pt2.x - pt0.x;
double dy2 = pt2.y - pt0.y;
return (dx1*dx2 + dy1*dy2)/sqrt((dx1*dx1 + dy1*dy1)*(dx2*dx2 + dy2*dy2) + 1e-10);
}
- (std::vector<std::vector<cv::Point> >)findSquaresInImage:(cv::Mat)_image
{
std::vector<std::vector<cv::Point> > squares;
cv::Mat pyr, timg, gray0(_image.size(), CV_8U), gray;
int thresh = 50, N = 11;
cv::pyrDown(_image, pyr, cv::Size(_image.cols/2, _image.rows/2));
cv::pyrUp(pyr, timg, _image.size());
std::vector<std::vector<cv::Point> > contours;
for( int c = 0; c < 3; c++ ) {
int ch[] = {c, 0};
mixChannels(&timg, 1, &gray0, 1, ch, 1);
for( int l = 0; l < N; l++ ) {
if( l == 0 ) {
cv::Canny(gray0, gray, 0, thresh, 5);
cv::dilate(gray, gray, cv::Mat(), cv::Point(-1,-1));
}
else {
gray = gray0 >= (l+1)*255/N;
}
cv::findContours(gray, contours, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE);
std::vector<cv::Point> approx;
for( size_t i = 0; i < contours.size(); i++ )
{
cv::approxPolyDP(cv::Mat(contours[i]), approx, arcLength(cv::Mat(contours[i]), true)*0.02, true);
if( approx.size() == 4 && fabs(contourArea(cv::Mat(approx))) > 1000 && cv::isContourConvex(cv::Mat(approx))) {
double maxCosine = 0;
for( int j = 2; j < 5; j++ )
{
double cosine = fabs(angle(approx[j%4], approx[j-2], approx[j-1]));
maxCosine = MAX(maxCosine, cosine);
}
if( maxCosine < 0.3 ) {
squares.push_back(approx);
}
}
}
}
}
return squares;
}
编辑于2012年8月17日:
使用以下代码在图像上绘制检测到的正方形:
cv::Mat debugSquares( std::vector<std::vector<cv::Point> > squares, cv::Mat image )
{
for ( int i = 0; i< squares.size(); i++ ) {
// draw contour
cv::drawContours(image, squares, i, cv::Scalar(255,0,0), 1, 8, std::vector<cv::Vec4i>(), 0, cv::Point());
// draw bounding rect
cv::Rect rect = boundingRect(cv::Mat(squares[i]));
cv::rectangle(image, rect.tl(), rect.br(), cv::Scalar(0,255,0), 2, 8, 0);
// draw rotated rect
cv::RotatedRect minRect = minAreaRect(cv::Mat(squares[i]));
cv::Point2f rect_points[4];
minRect.points( rect_points );
for ( int j = 0; j < 4; j++ ) {
cv::line( image, rect_points[j], rect_points[(j+1)%4], cv::Scalar(0,0,255), 1, 8 ); // blue
}
}
return image;
}

{kind=link}