我想使用Python中的OpenCV来检测树莓派相机的实时视频中的正方形。 然而,下面代码中的
我无法解决这个错误。 希望能得到任何帮助。
代码取自https://www.pyimagesearch.com/2015/05/04/target-acquired-finding-targets-in-drone-and-quadcopter-video-streams-using-python-and-opencv/#comment-446639
cv2.GaussianBlur和cv2.Canny函数会导致以下错误:"TypeError:numpy.ndarray' object is not callable"。我无法解决这个错误。 希望能得到任何帮助。
代码取自https://www.pyimagesearch.com/2015/05/04/target-acquired-finding-targets-in-drone-and-quadcopter-video-streams-using-python-and-opencv/#comment-446639
import cv2
# load the video
camera = cv2.VideoCapture(0)
# keep looping
while True:
# grab the current frame and initialize the status text
(grabbed, frame) = camera.read()
status = "No Targets"
# check to see if we have reached the end of the
# video
if not grabbed:
break
# convert the frame to grayscale, blur it, and detect edges
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (7, 7), 0)
edged = cv2.Canny(blurred, 50, 150)
# find contours in the edge map
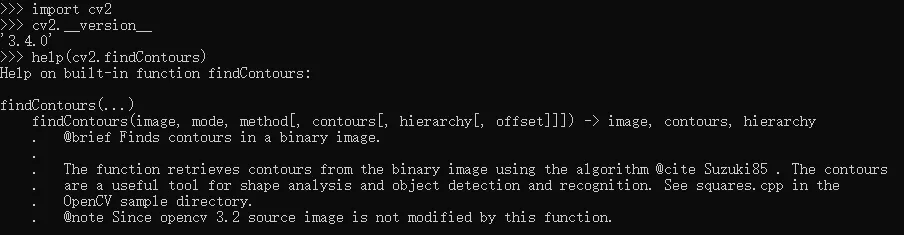
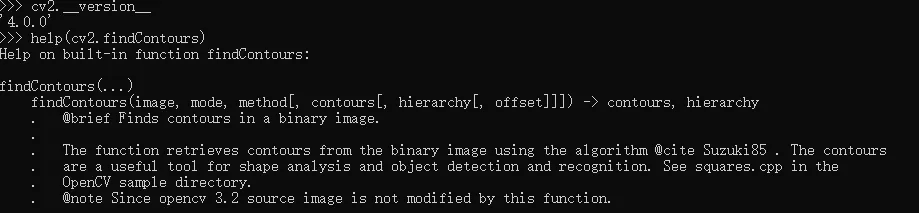
(cnts, _) = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
# loop over the contours
for c in cnts:
# approximate the contour
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.01 * peri, True)
# ensure that the approximated contour is "roughly" rectangular
if len(approx) >= 4 and len(approx) <= 6:
# compute the bounding box of the approximated contour and
# use the bounding box to compute the aspect ratio
(x, y, w, h) = cv2.boundingRect(approx)
aspectRatio = w / float(h)
# compute the solidity of the original contour
area = cv2.contourArea(c)
hullArea = cv2.contourArea(cv2.convexHull(c))
solidity = area / float(hullArea)
# compute whether or not the width and height, solidity, and
# aspect ratio of the contour falls within appropriate bounds
keepDims = w > 25 and h > 25
keepSolidity = solidity > 0.9
keepAspectRatio = aspectRatio >= 0.8 and aspectRatio <= 1.2
# ensure that the contour passes all our tests
if keepDims and keepSolidity and keepAspectRatio:
# draw an outline around the target and update the status
# text
cv2.drawContours(frame, [approx], -1, (0, 0, 255), 4)
status = "Target(s) Acquired"
# draw the status text on the frame
cv2.putText(frame, status, (20, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.5,
(0, 0, 255), 2)
# show the frame and record if a key is pressed
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
# if the 'q' key is pressed, stop the loop
if key == ord("q"):
break
# cleanup the camera and close any open windows
camera.release()
cv2.destroyAllWindows()