我有一张来自ToF相机(Kinect V2)的深度图像。我不知道像素大小,但我知道深度图像的分辨率为512x424。我还知道我拥有70.6x60度的视场角。
我之前在这里询问了如何获取像素大小。在Matlab中,代码如下所示。
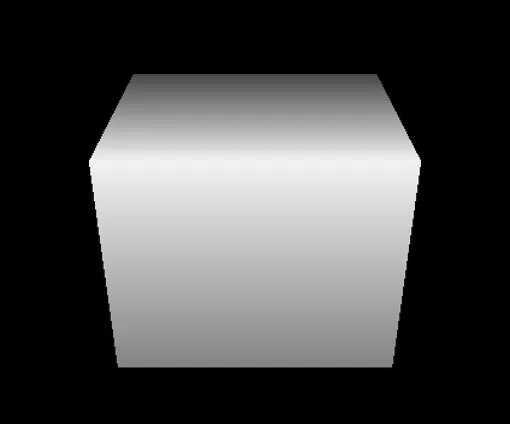
亮度越高的像素,物体越近。
close all
clear all
%Load image
depth = imread('depth_0_30_0_0.5.png');
frame_width = 512;
frame_height = 424;
horizontal_scaling = tan((70.6 / 2) * (pi/180));
vertical_scaling = tan((60 / 2) * (pi/180));
%pixel size
with_size = horizontal_scaling * 2 .* (double(depth)/frame_width);
height_size = vertical_scaling * 2 .* (double(depth)/frame_height);
图像本身是一个旋转了30度的立方体,可以在这里看到:
 。
。现在我想计算像素到摄像机平面的水平角度和垂直角度。
我尝试使用三角测量来完成这个任务,首先在水平方向上计算一个像素到另一个像素的Z距离,然后再在垂直方向上进行计算。我使用卷积来实现这个过程:
%get the horizontal errors
dx = abs(conv2(depth,[1 -1],'same'));
%get the vertical errors
dy = abs(conv2(depth,[1 -1]','same'));
接下来我通过 atan 函数进行计算,代码如下:
horizontal_angle = rad2deg(atan(with_size ./ dx));
vertical_angle = rad2deg(atan(height_size ./ dy));
horizontal_angle(horizontal_angle == NaN) = 0;
vertical_angle(vertical_angle == NaN) = 0;
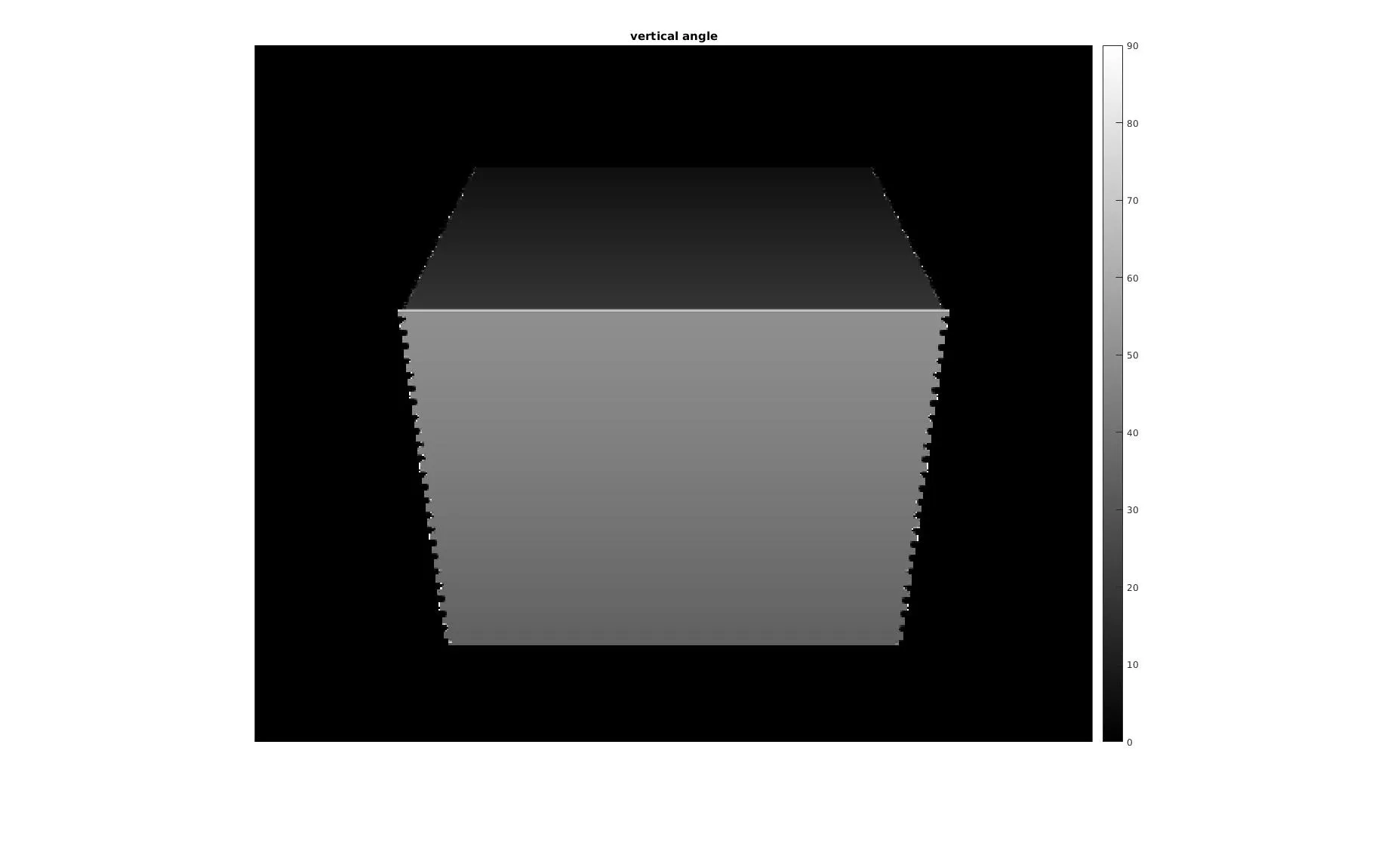
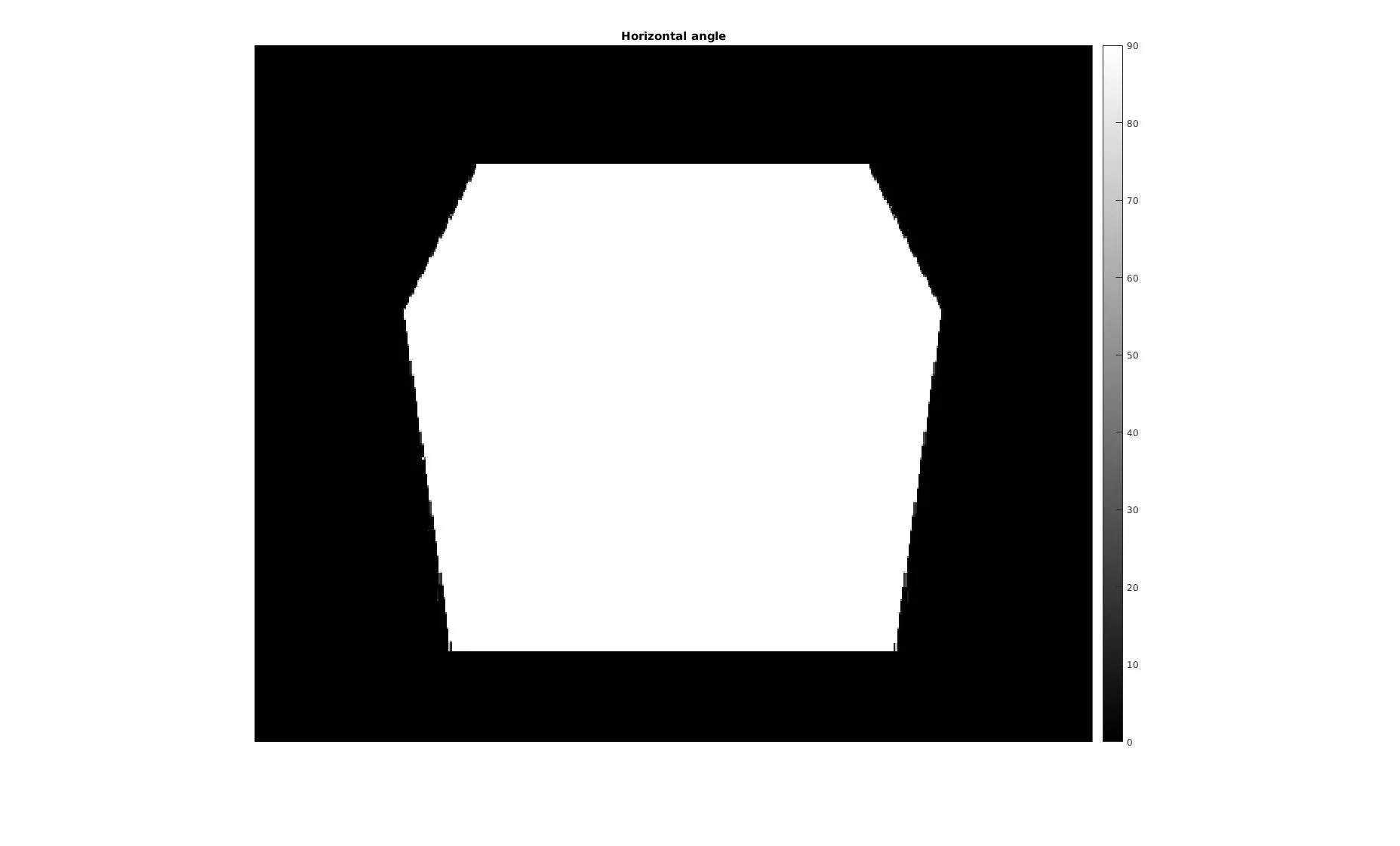
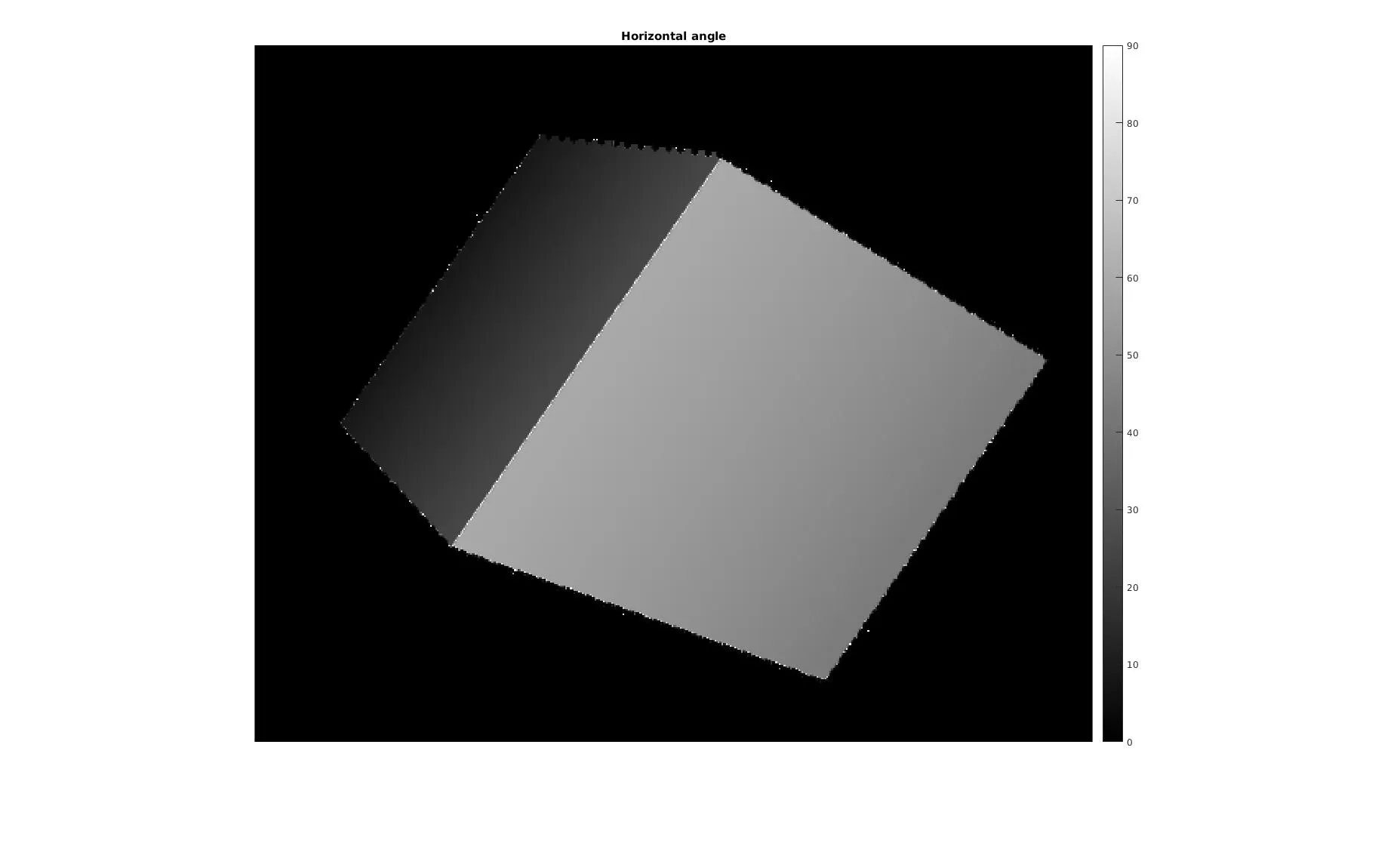
这里展示了一个有希望的结果,如下所示:
 。
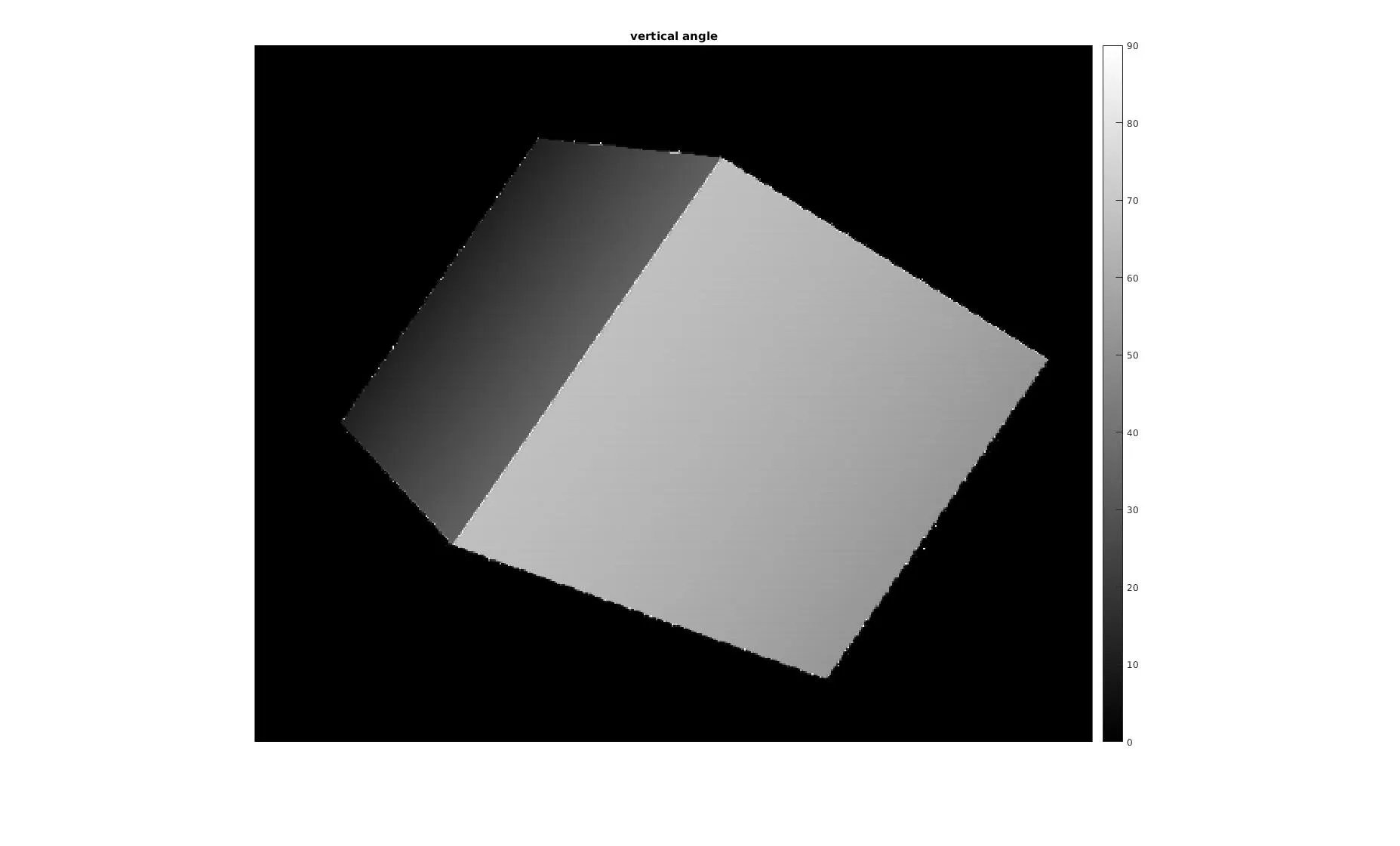
。然而,使用像这样稍微复杂一点的图像,它被旋转了60°和30°,会得到相同角度的水平和垂直角度的图像,如下所示:
 。
。从两幅图像中相互减去后,可以得到以下图像-表明这两者之间存在差异:
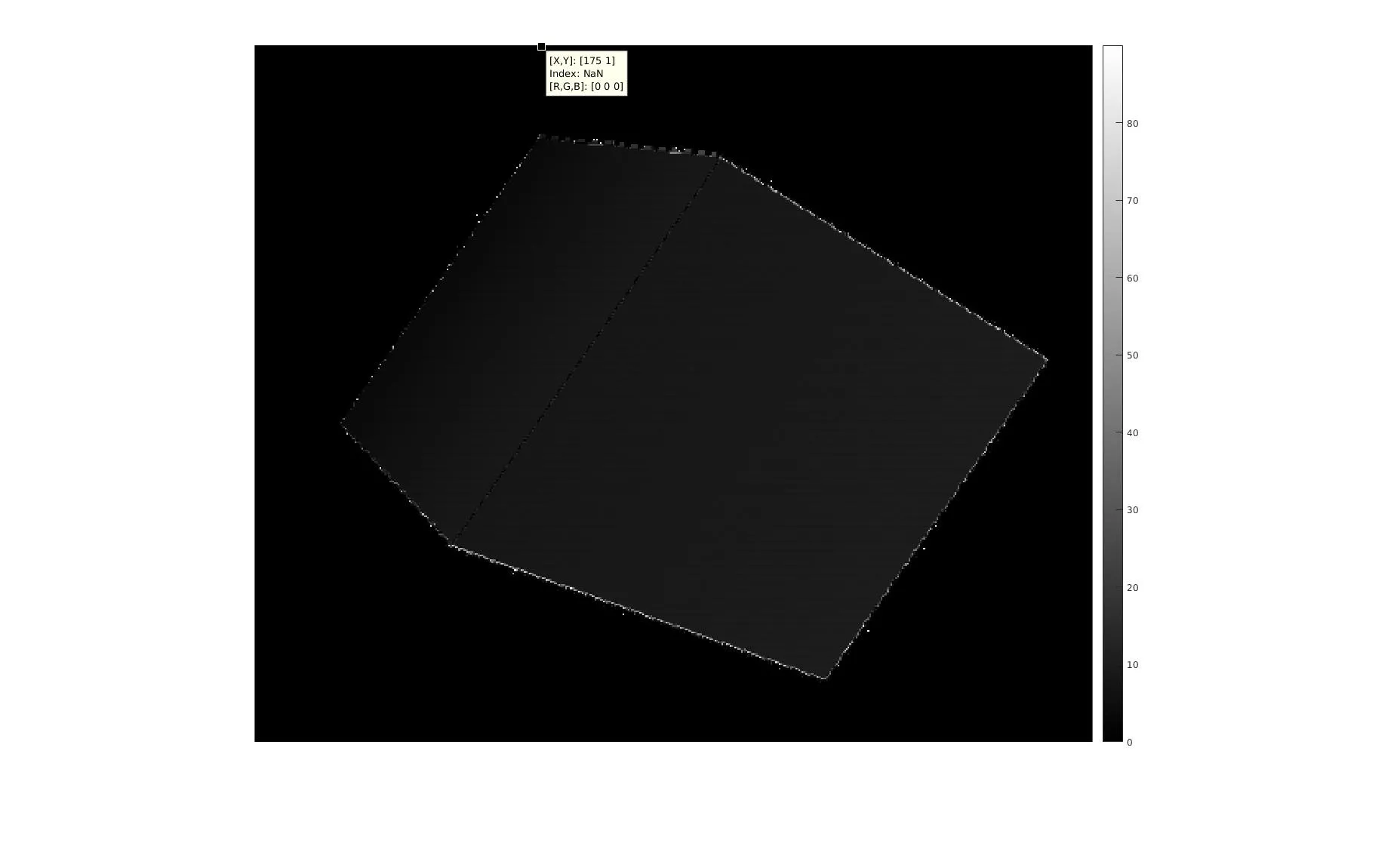 。
。因此,我的问题是:如何证明这个概念?数学是否正确,只是测试用例选择不当?在两幅图像之间从水平到垂直角度的角度差太小了吗?计算中是否有任何错误?