因此,我们有这样的情况:
在这个示例中,第一个四边形显示在图像平面上,第二个四边形显示在世界平面上。[1]
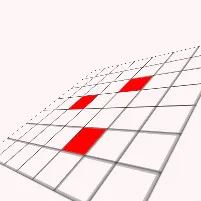
在我的特定案例中,图像平面有3个四边形 - 实际世界正方形的投影,正方形具有相同的大小,位于同一平面上,相对于它们所在的平面具有相同的旋转,并且不位于同一行上。
我想知道是否可以根据所描述的内容获取图像平面到世界平面的旋转角度?
在我的案例中,输入数据结构如下:原始图像(RGB像素),带有图像平面上点(x,y)的物体(正方形)和角度。
因此,我们有这样的情况:
在这个示例中,第一个四边形显示在图像平面上,第二个四边形显示在世界平面上。[1]
在我的特定案例中,图像平面有3个四边形 - 实际世界正方形的投影,正方形具有相同的大小,位于同一平面上,相对于它们所在的平面具有相同的旋转,并且不位于同一行上。
我想知道是否可以根据所描述的内容获取图像平面到世界平面的旋转角度?
在我的案例中,输入数据结构如下:原始图像(RGB像素),带有图像平面上点(x,y)的物体(正方形)和角度。