我有两个右手坐标系。
OpenCV
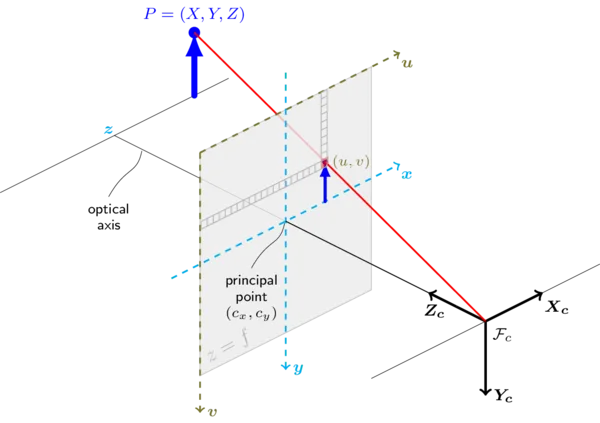
如您所见,黑色箭头表示相机朝着正 $Z$ 轴拍摄。您可以忽略图表中的其余部分。
OpenGL
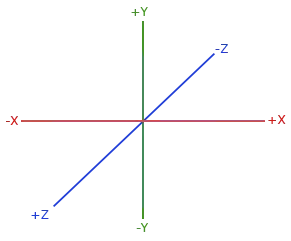
虽然在此处不可见,但 OpenGL 中的相机朝下看 -Z 轴。我想将 OpenCV 坐标系中相机前方的 3D 点转换为 OpenGL 中相机前方的 3D 点。
我试图用一个 4x4 的矩阵来连接 R、T 和底部的 0001。
到目前为止,我尝试了以下内容:
1 0 0 0
0 -1 0 0
0 0 -1 0
0 0 0 1
但是似乎它什么也没有做,OpenGL坐标系中没有任何显示。


[0,1,0])以查看它们是否被旋转。另一种双重检查方法是使用OpenCV viz来调试/可视化变换前后的点。 - api55