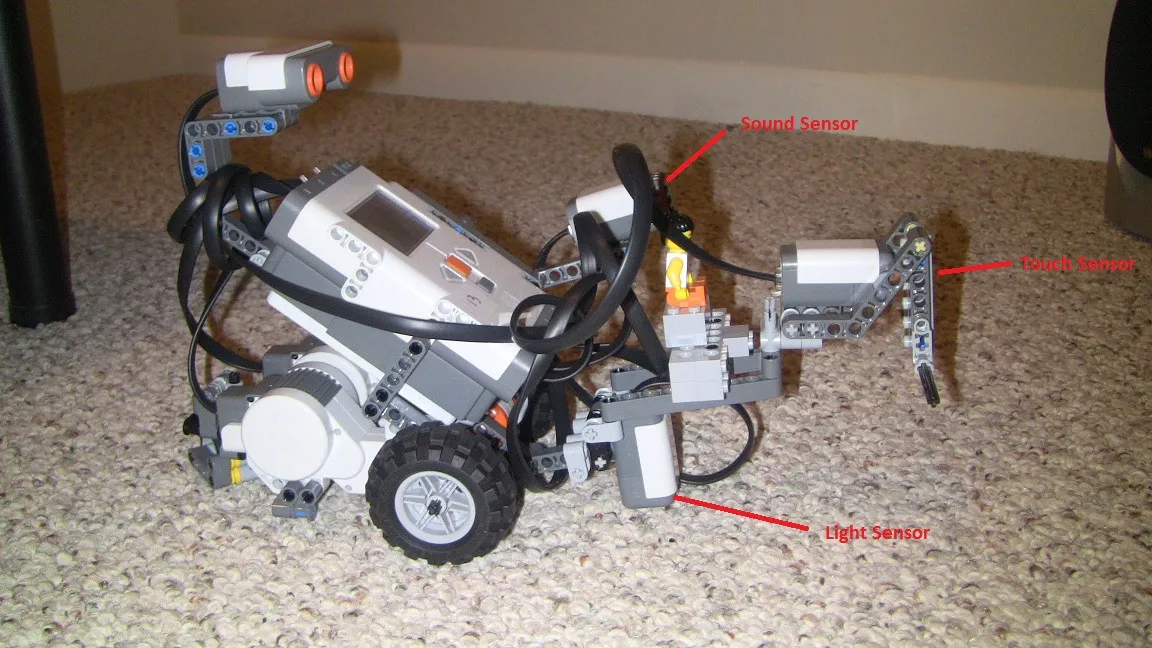
我是NBC编程的新手,我正在尝试编程我的乐高NXT砖块来搜索和跟随我在地板上放置的一条黑色电子胶带(我将光感应器放在前方并指向地面)。目前为止,灯亮了,但机器人只是继续走过胶带而没有意识到它。我还设置了当机器人撞到墙壁时停下来并转身的功能,这个也正常工作。唯一不正常的是当光线经过黑胶带时没有注意到并跟随它。请问有谁可以看一下我的代码,告诉我哪里出错了吗?
dseg segment
Switch sword 0
Volume sword 0
Level sword 0
Distance sword 0
dseg ends
thread main
SetSensorTouch(IN_1) // touch sensor connected to IN_1
SetSensorSound(IN_2) // sound sensor connected to IN_2
SetSensorLight(IN_3) // Light Sensor connected to input 3
SetSensorUltrasonic(IN_4) // Ultrasonic Sensor connected to input 4
OnFwd(OUT_BC,80) // move forward
CheckSensor:
ReadSensor(IN_1,Switch) // reads current value of sensor (0/1)
brtst EQ, CheckSensor, Switch // branch to CheckSensor if Switch = 0
// i.e., exit the loop when Switch = 1
OnRev(OUT_BC,40) // move backward
wait 500
OnFwd(OUT_B,20) // turn
wait 500
jmp CheckSound
CheckSound:
ReadSensor(IN_2, Volume)
brcmp GT, ExitCheck, Volume, 60
jmp CheckSound
ExitCheck:
OnFwd(OUT_BC,60)
jmp CheckLight
CheckLight:
ReadSensor(IN_3,Level)
brcmp LT, CheckLight, Level, 60
ReadSensorUS(IN_4,Distance)
brcmp LT, EndPoint, Distance, 30
OnFwd(OUT_C, 10)
FindPath:
ReadSensor(IN_3,Level)
brcmp GTEQ, FindPath, Level, 60
OnFwd(OUT_BC, 60)
jmp CheckLight
EndPoint:
Off(OUT_BC)
wait 1500
endt