我正在从头开始构建一个光线追踪器。我的问题是:当我改变相机坐标时,球体会变成椭圆形。我不明白为什么会发生这种情况。
以下是一些图像,展示了这些伪影:
之后:
以下是一些图像,展示了这些伪影:
Sphere: 1 1 -1 1.0 (Center, radius)
Camera: 0 0 5 0 0 0 0 1 0 45.0 1.0 (eyepos, lookat, up, foy, aspect)

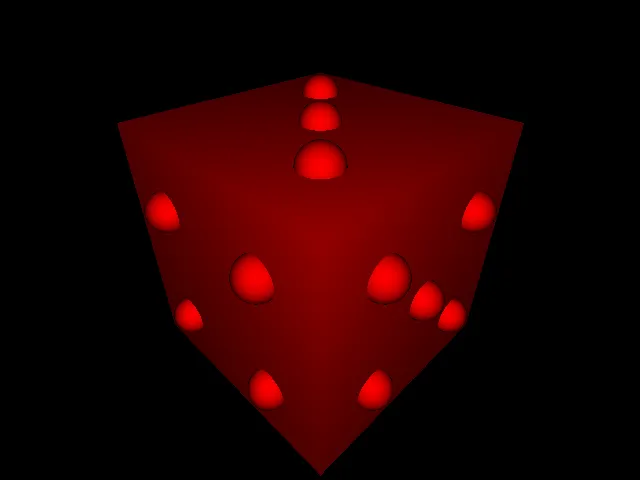
但是当我更改相机坐标后,球体看起来会发生形变,如下所示:
Camera: -2 -2 2 0 0 0 0 1 0 45.0 1.0

我不明白出了什么问题。如果有人能帮忙,那太好了!
我如下设置了我的imagePlane:
//Computing u,v,w axes coordinates of Camera as follows:
{
Vector a = Normalize(eye - lookat); //Camera_eye - Camera_lookAt
Vector b = up; //Camera Up Vector
m_w = a;
m_u = b.cross(m_w);
m_u.normalize();
m_v = m_w.cross(m_u);
}
接下来,我会根据相机位置(眼睛)计算每个像素的方向,具体方法如下:
//Then Computing direction as follows:
int half_w = m_width * 0.5;
int half_h = m_height * 0.5;
double half_fy = fovy() * 0.5;
double angle = tan( ( M_PI * half_fy) / (double)180.0 );
for(int k=0; k<pixels.size(); k++){
double j = pixels[k].x(); //width
double i = pixels[k].y(); //height
double XX = aspect() * angle * ( (j - half_w ) / (double)half_w );
double YY = angle * ( (half_h - i ) / (double)half_h );
Vector dir = (m_u * XX + m_v * YY) - m_w ;
directions.push_back(dir);
}
之后:
for each dir:
Ray ray(eye, dir);
int depth = 0;
t_color += Trace(g_primitive, ray, depth);
相机的所有三个xyz坐标都不为零,那么它会显示扭曲,但是如果任何一个xyz坐标为零,那么它就可以正常工作。 我认为这可能是透视失真引起的,但我想知道是否还有其他原因导致这个问题。 - sinner