我是一位可以翻译文本的有用助手。
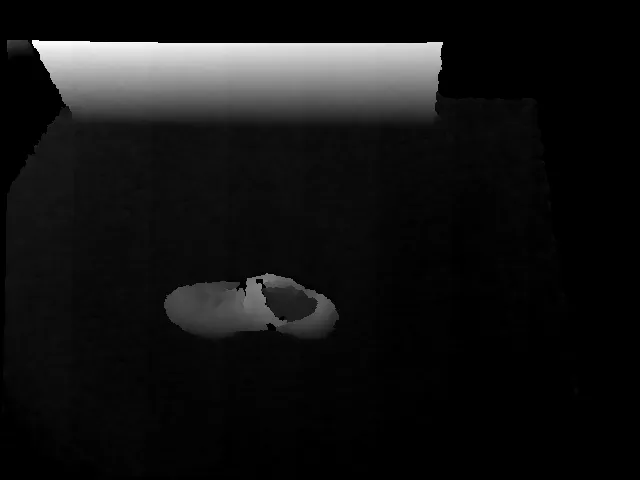
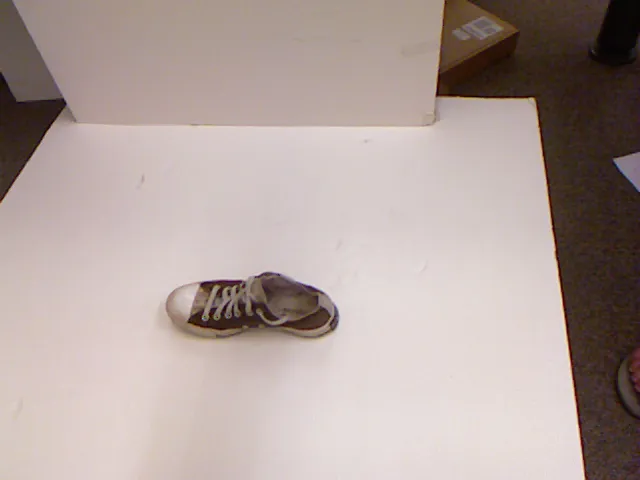
我有一张RGB图像(我们称之为test.png),以及对应的3D云点(使用立体相机提取)。现在,我想使用深度信息来训练我的神经网络。
3D点云的格式如下:
根据描述,它们是与该像素(来自test.png)相交的空间点,具有x、y和z坐标(相对于拍摄图像的机器人底座,因此我们称之为“全局空间”)。 (来自康奈尔抓握数据集)
您可以通过每行中的最后一列(标记为“index”)确定每行所指示的像素。
该数字是像素的行号和列号的编码。在我们所有的图像中, 都有640列和480行。使用以下公式将索引映射到行、列对。 请注意,index = 0映射到row 1,col 1。
行 = floor(index / 640)+1
列 =(index MOD 640)+1
我有一张RGB图像(我们称之为test.png),以及对应的3D云点(使用立体相机提取)。现在,我想使用深度信息来训练我的神经网络。
3D点云的格式如下:
.PCD v.7 - Point Cloud Data file format
FIELDS x y z rgb index
SIZE 4 4 4 4 4
TYPE F F F F U
COUNT 1 1 1 1 1
WIDTH 253674
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS 253674
DATA ascii
我该如何从点云中提取深度信息,并且在不使用RGB图像的情况下添加一个深度通道,使用RGBD图像来训练我的网络?
例如:给定两个像素的点云信息(FIELDS)如下:
1924.064 -647.111 -119.4176 0 25547
1924.412 -649.678 -119.7147 0 25548
根据描述,它们是与该像素(来自test.png)相交的空间点,具有x、y和z坐标(相对于拍摄图像的机器人底座,因此我们称之为“全局空间”)。 (来自康奈尔抓握数据集)
您可以通过每行中的最后一列(标记为“index”)确定每行所指示的像素。
该数字是像素的行号和列号的编码。在我们所有的图像中, 都有640列和480行。使用以下公式将索引映射到行、列对。 请注意,index = 0映射到row 1,col 1。
行 = floor(index / 640)+1
列 =(index MOD 640)+1