我将在下面提供numpy/scipy的代码,因为我几乎没有Matlab经验。
如果你的曲线足够平滑,你可以将转折点识别为最高
曲率点。以点索引号作为曲线参数,使用
中心差分方案,你可以使用以下代码计算曲率。
import numpy as np
import matplotlib.pyplot as plt
import scipy.ndimage
def first_derivative(x) :
return x[2:] - x[0:-2]
def second_derivative(x) :
return x[2:] - 2 * x[1:-1] + x[:-2]
def curvature(x, y) :
x_1 = first_derivative(x)
x_2 = second_derivative(x)
y_1 = first_derivative(y)
y_2 = second_derivative(y)
return np.abs(x_1 * y_2 - y_1 * x_2) / np.sqrt((x_1**2 + y_1**2)**3)
你可能需要先平滑曲线,然后计算曲率,接着找出最高曲率点。以下函数正是实现这一目的:
def plot_turning_points(x, y, turning_points=10, smoothing_radius=3,
cluster_radius=10) :
if smoothing_radius :
weights = np.ones(2 * smoothing_radius + 1)
new_x = scipy.ndimage.convolve1d(x, weights, mode='constant', cval=0.0)
new_x = new_x[smoothing_radius:-smoothing_radius] / np.sum(weights)
new_y = scipy.ndimage.convolve1d(y, weights, mode='constant', cval=0.0)
new_y = new_y[smoothing_radius:-smoothing_radius] / np.sum(weights)
else :
new_x, new_y = x, y
k = curvature(new_x, new_y)
turn_point_idx = np.argsort(k)[::-1]
t_points = []
while len(t_points) < turning_points and len(turn_point_idx) > 0:
t_points += [turn_point_idx[0]]
idx = np.abs(turn_point_idx - turn_point_idx[0]) > cluster_radius
turn_point_idx = turn_point_idx[idx]
t_points = np.array(t_points)
t_points += smoothing_radius + 1
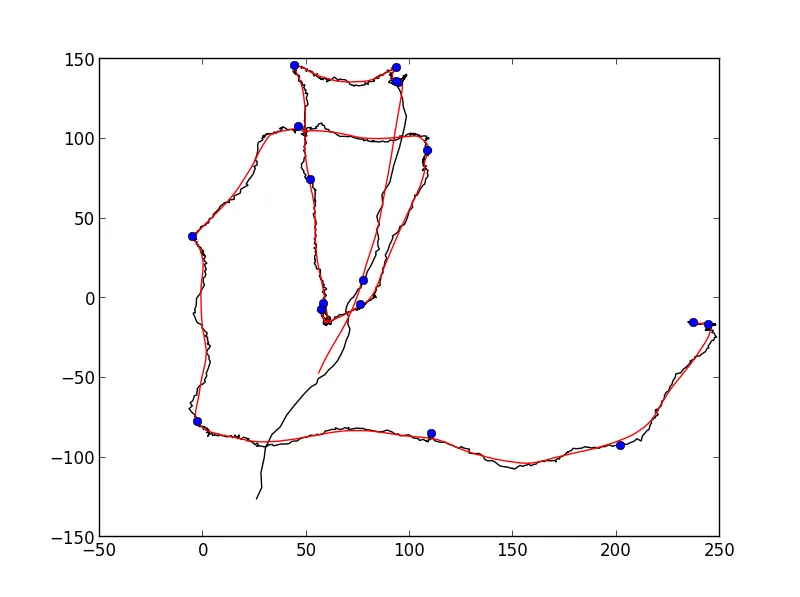
plt.plot(x,y, 'k-')
plt.plot(new_x, new_y, 'r-')
plt.plot(x[t_points], y[t_points], 'o')
plt.show()
需要进行一些解释:
turning_points 是你想要识别的点数。smoothing_radius 是在计算曲率之前应用于数据的平滑卷积半径。cluster_radius 是从选择为拐点的高曲率点到不考虑其他点的距离。
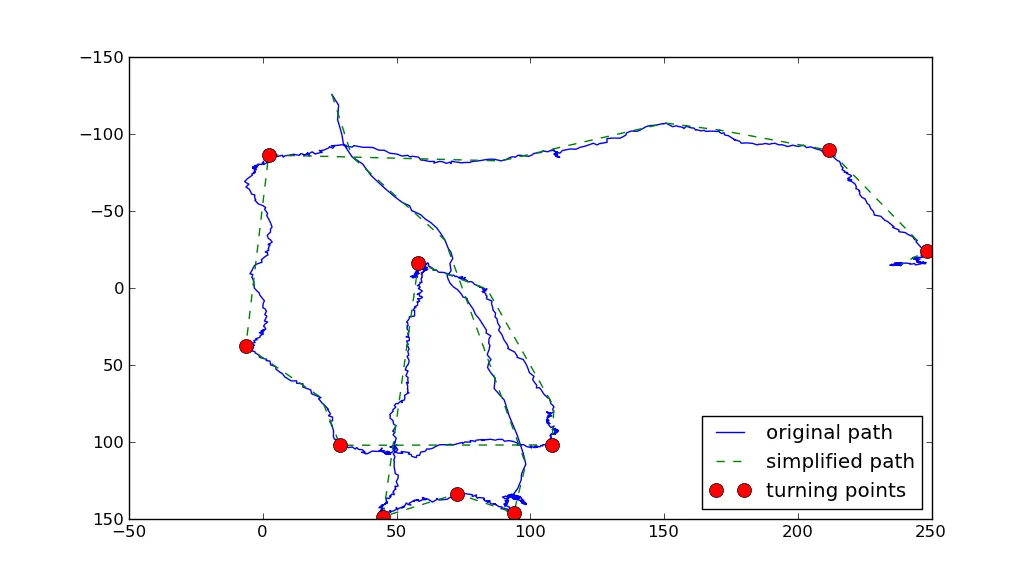
您可能需要稍微调整一下参数,但我得到了类似这样的结果:
>>> x, y = np.genfromtxt('bla.data')
>>> plot_turning_points(x, y, turning_points=20, smoothing_radius=15,
... cluster_radius=75)
可能不够完全自动化的检测,但它非常接近你想要的。
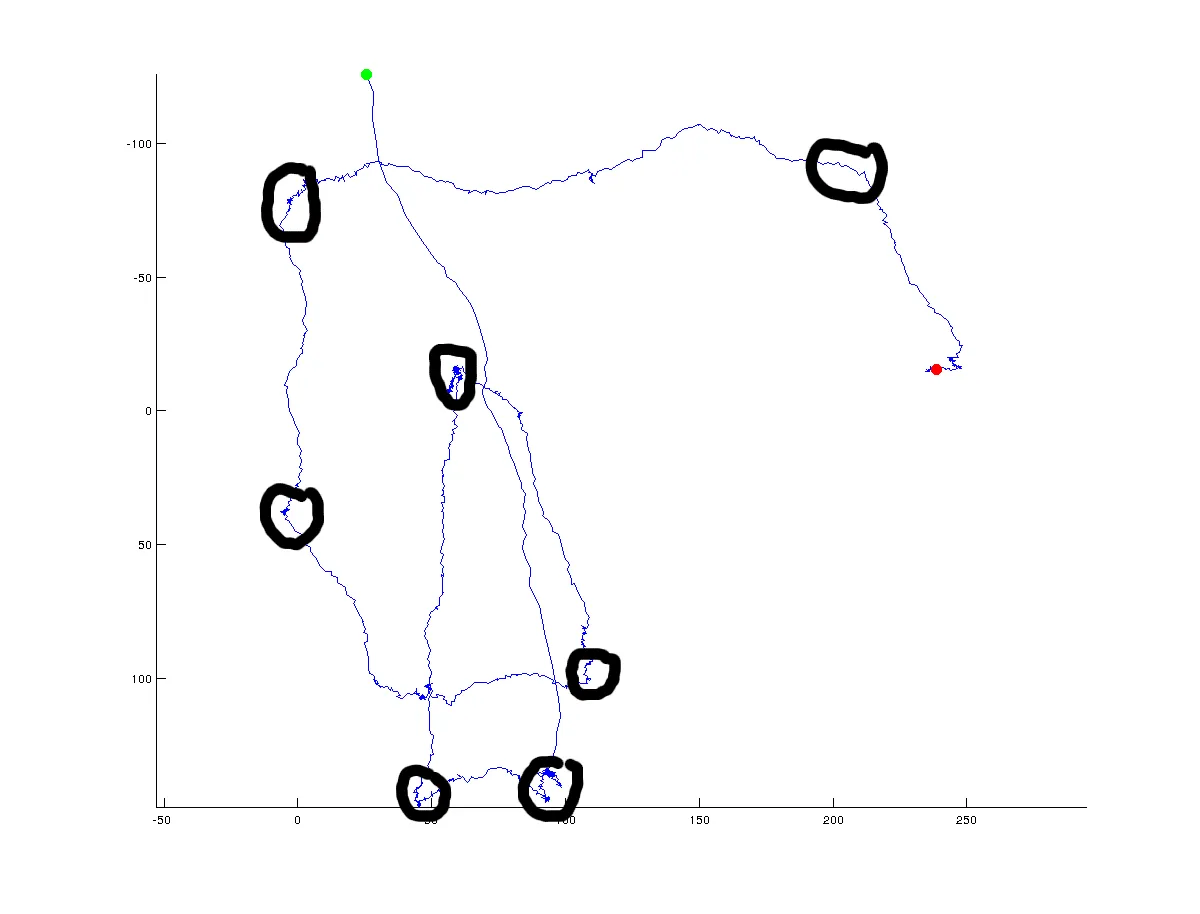
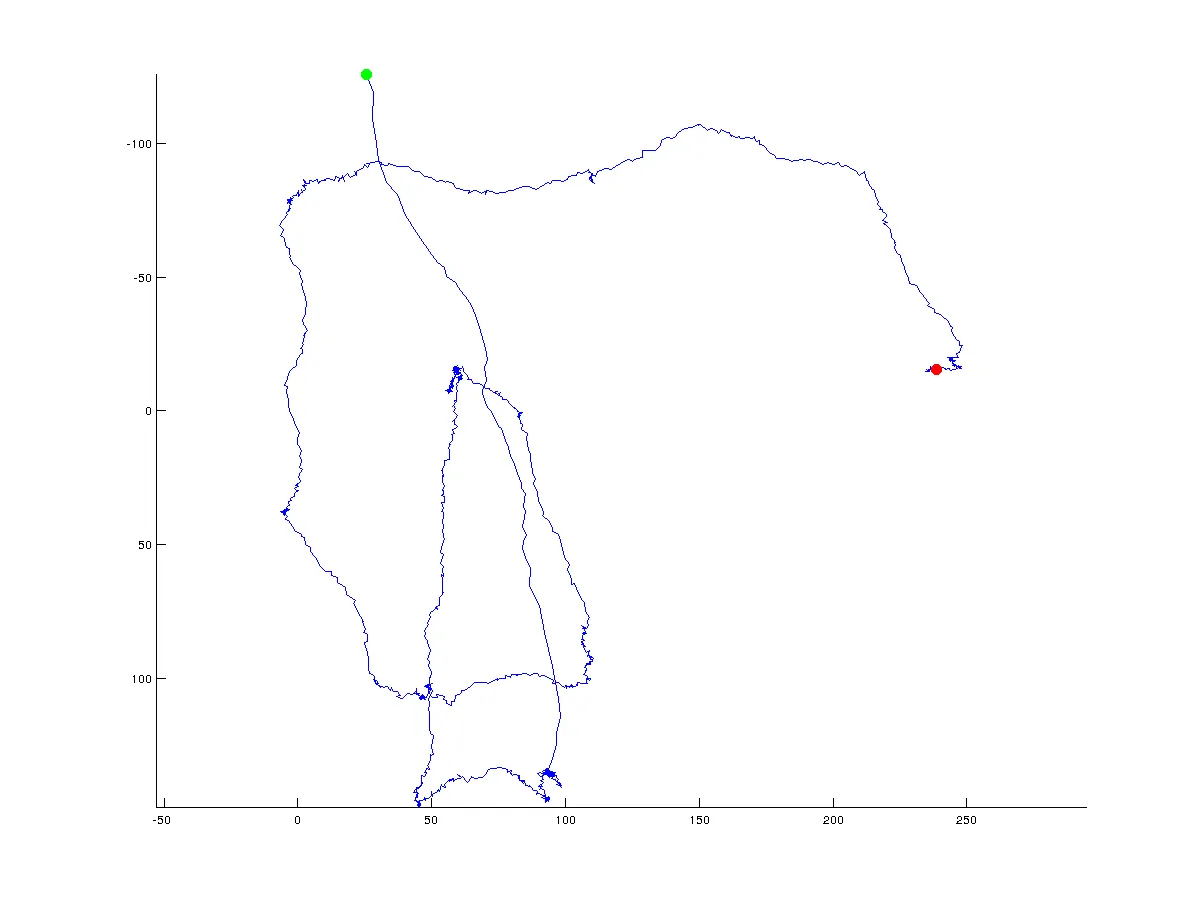 在下图中,我手动添加了算法可能返回的可能(全局)转折点:
在下图中,我手动添加了算法可能返回的可能(全局)转折点: