很遗憾,Oliver Wilken 的答案没有显示出图片。可能是因为使用了不同的 openCV 版本?这里是我采用的版本,增加了几个功能:
- 对矩形进行缩放和填充,即获取原始矩形外部的部分
- 可以根据矩形配置生成图像的角度,例如 0 或 90 [deg] 的角度将水平或垂直返回矩形
- 返回旋转其他物体(例如点、线等)所需的转换矩阵
- numpy 和 openCV 数组索引和矩形操作的辅助函数
代码
import cv2
import numpy as np
def img_rectangle_cut(img, rect=None, angle=None):
"""Translate an image, defined by a rectangle. The image is cropped to the size of the rectangle
and the cropped image can be rotated.
The rect must be of the from (tuple(center_xy), tuple(width_xy), angle).
The angle are in degrees.
PARAMETER
---------
img: ndarray
rect: tuple, optional
define the region of interest. If None, it takes the whole picture
angle: float, optional
angle of the output image in respect to the rectangle.
I.e. angle=0 will return an image where the rectangle is parallel to the image array axes
If None, no rotation is applied.
RETURNS
-------
img_return: ndarray
rect_return: tuple
the rectangle in the returned image
t_matrix: ndarray
the translation matrix
"""
if rect is None:
if angle is None:
angle = 0
rect = (tuple(np.array(img.shape) * .5), img.shape, 0)
box = cv2.boxPoints(rect)
rect_target = rect_rotate(rect, angle=angle)
pts_target = cv2.boxPoints(rect_target)
size_target = np.int0(np.ceil(np.max(pts_target, axis=0) - np.min(pts_target, axis=0)))
t_matrix = cv2.getAffineTransform(box[:3].astype(np.float32),
pts_target[:3].astype(np.float32))
img_target = cv2.warpAffine(cv2.transpose(img), t_matrix, tuple(size_target))
img_target = cv2.transpose(img_target)
return img_target, rect_target, t_matrix
def reshape_cv(x, axis=-1):
"""openCV and numpy have a different array indexing (row, cols) vs (cols, rows), compensate it here."""
if axis < 0:
axis = len(x.shape) + axis
return np.array(x).astype(np.float32)[(*[slice(None)] * axis, slice(None, None, -1))]
def connect(x):
"""Connect data for a polar or closed loop plot, i.e. np.append(x, [x[0]], axis=0)."""
if isinstance(x, np.ma.MaskedArray):
return np.ma.append(x, [x[0]], axis=0)
else:
return np.append(x, [x[0]], axis=0)
def transform_np(x, t_matrix):
"""Apply a transform on a openCV indexed array and return a numpy indexed array."""
return transform_cv2np(reshape_cv(x), t_matrix)
def transform_cv2np(x, t_matrix):
"""Apply a transform on a numpy indexed array and return a numpy indexed array."""
return reshape_cv(cv2.transform(np.array([x]).astype(np.float32), t_matrix)[0])
def rect_scale_pad(rect, scale=1., pad=40.):
"""Scale and/or pad a rectangle."""
return (rect[0],
tuple((np.array(rect[1]) + pad) * scale),
rect[2])
def rect_rotate(rect, angle=None):
"""Rotate a rectangle by an angle in respect to it's center.
The rect must be of the from (tuple(center_xy), tuple(width_xy), angle).
The angle is in degrees.
"""
if angle is None:
angle = rect[2]
rad = np.deg2rad(np.abs(angle))
rot_matrix_2d = np.array([[np.cos(rad), np.sin(rad)],
[np.sin(rad), np.cos(rad)]])
center = np.sum(np.array(rect[1]).reshape(1, -1) * rot_matrix_2d, axis=-1) * .5
center = np.abs(center)
return tuple(center), rect[1], angle
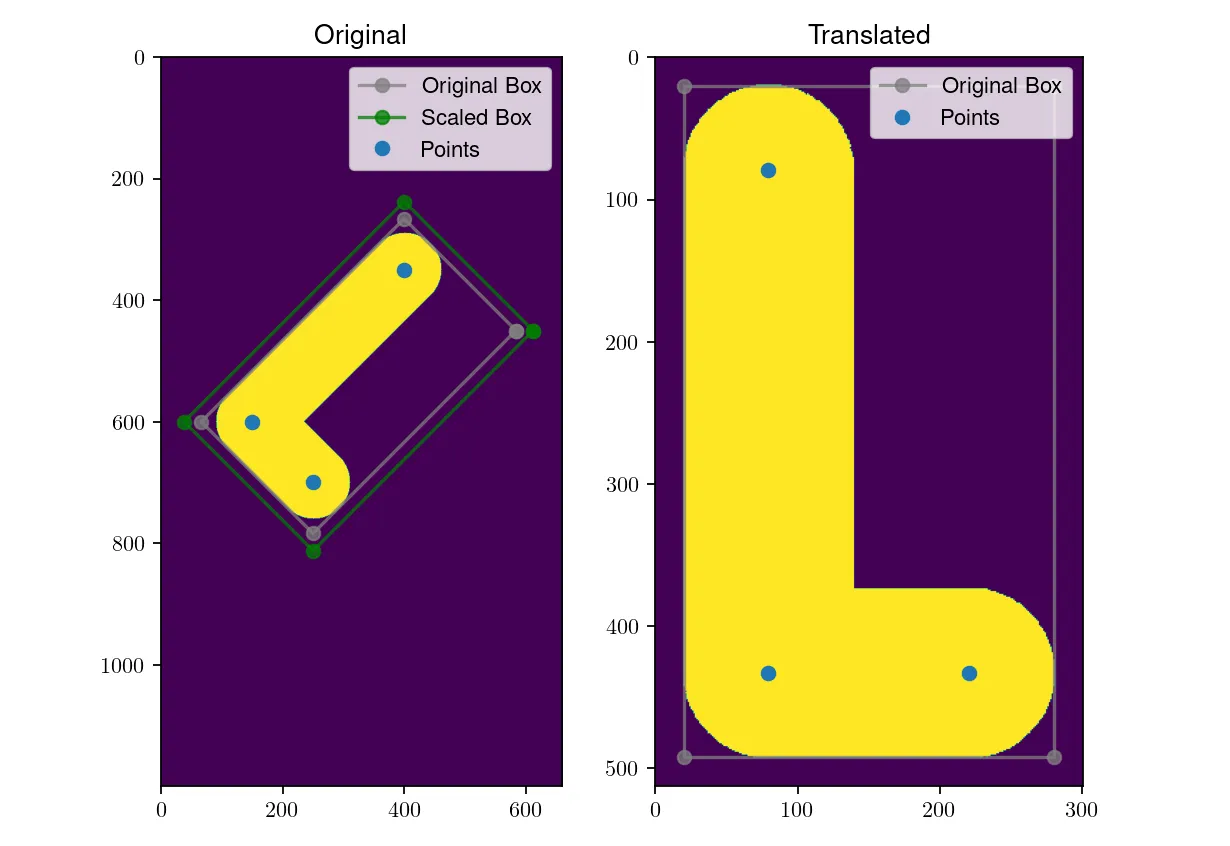
例子:
img = np.zeros((1200, 660), dtype=np.uint8)
x_0 = np.array([150,600])
x_1 = np.int0(x_0 + np.array((100, 100)))
x_2 = np.int0(x_0 + np.array((100, -100))*2.5)
img = cv2.line(img,tuple(x_0),tuple(x_1),1,120)
img = cv2.line(img,tuple(x_0),tuple(x_2),1,120)
points = np.array([x_0, x_1, x_2])
rect = cv2.minAreaRect(np.argwhere(img))
rect_scale = rect_scale_pad(rect, scale = 1., pad = 40.)
img_return, rect_target, t_matrix = img_rectangle_cut(
img,
rect_scale,
angle=0,
angle_normalize=True
)
fig, ax = plt.subplots(ncols=2, figsize=(10,5))
ax = ax.flatten()
ax[0].imshow(img)
box_i = reshape_cv(cv2.boxPoints(rect))
ax[0].plot(*connect(box_i).T, 'o-', color='gray', alpha=.75, label='Original Box')
box_i = reshape_cv(cv2.boxPoints(rect_scale))
ax[0].plot(*connect(box_i).T, 'o-', color='green', alpha=.75, label='Scaled Box')
ax[0].plot(*points.T, 'o', label='Points')
ax[1].imshow(img_return)
box_i = transform_cv2np(cv2.boxPoints(rect), t_matrix)
ax[1].plot(*connect(box_i).T, 'o-', color='gray', alpha=.75, label='Original Box')
point_t = transform_np(points, t_matrix)
ax[1].plot(*point_t.T, 'o', label='Points')
ax[0].set_title('Original')
ax[1].set_title('Translated')
for axi in ax:
axi.legend(loc=1)
plt.tight_layout()



fillConvexPoly或drawContours(... CV_FILLED)非常容易)。2)黑色初始化一个与原始图像大小相同的矩阵。3)仅将掩模内容复制到新图像中(new_image.setTo(old_image, mask))。4)在旋转矩形的边界框上裁剪新图像。 - Miki