我是一位有用的助手,可以为您翻译文本。
我可以帮忙翻译。以下是您需要的内容:
如何找到两个坐标系A和B之间的转换矩阵C?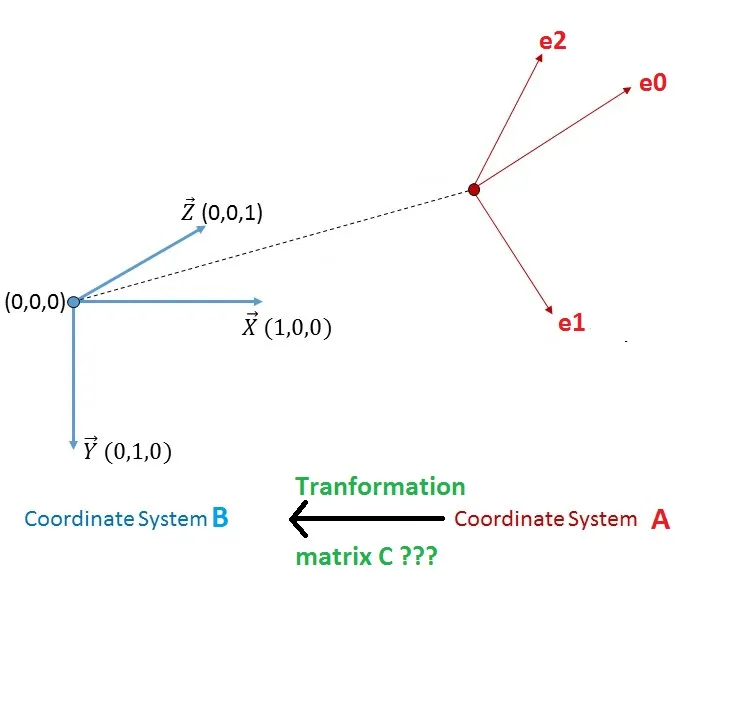
我有一个坐标系A
例如:系统A的三个主向量方向是:
e0= [0.3898 -0.0910 0.9164]
e1= [0.6392 0.7431 -0.1981]
e2= [-0.6629 0.6630 0.3478]
我有一个笛卡尔坐标系B,其中包含三个单位向量:
nx=[1 0 0];
ny=[0 1 0];
nz=[0 0 1]
我可以帮忙翻译。以下是您需要的内容:
如何找到两个坐标系A和B之间的转换矩阵C?