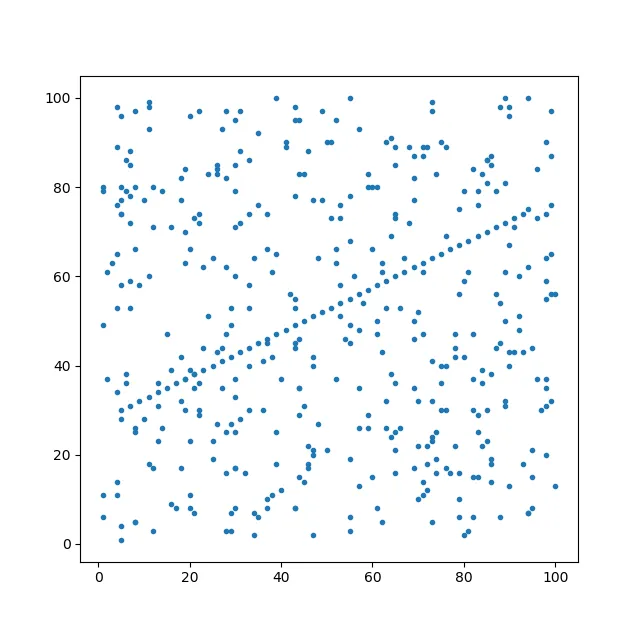
我已经尽力去寻找如何使用OpenCV进行直线检测的方法。然而,我无法找到我需要的示例。我想要用它来在简单的二维点云中找到直线。作为测试,我想使用以下点:
import random
import numpy as np
import matplotlib.pyplot as plt
a = np.random.randint(1,101,400) # Random points.
b = np.random.randint(1,101,400) # Random points.
for i in range(0, 90, 2): # A line to detect
a = np.append(a, [i+5])
b = np.append(b, [0.5*i+30])
plt.plot(a, b, '.')
plt.show()
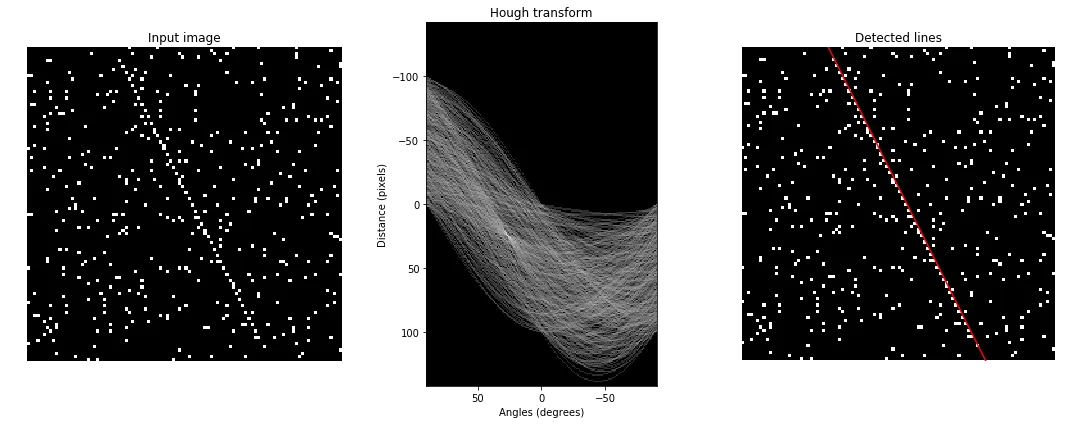
我已经找到了许多Hough变换的初始示例。但是,当涉及到代码示例时,我只能发现使用了图像。
是否有一种方法可以使用OpenCV Hough变换来检测一组点中的线条,或者您可以推荐任何其他方法或库?
---- 编辑 ----
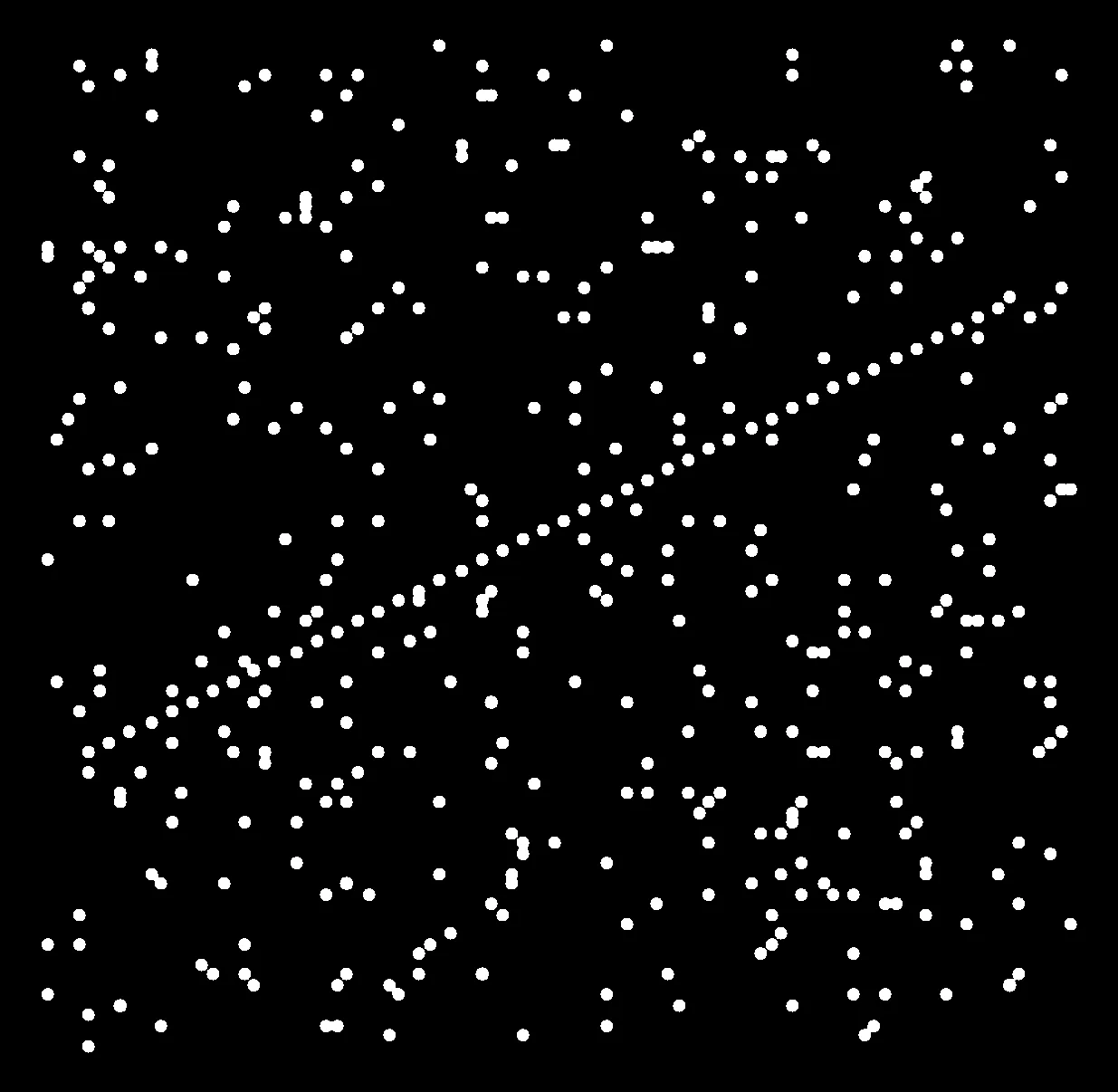
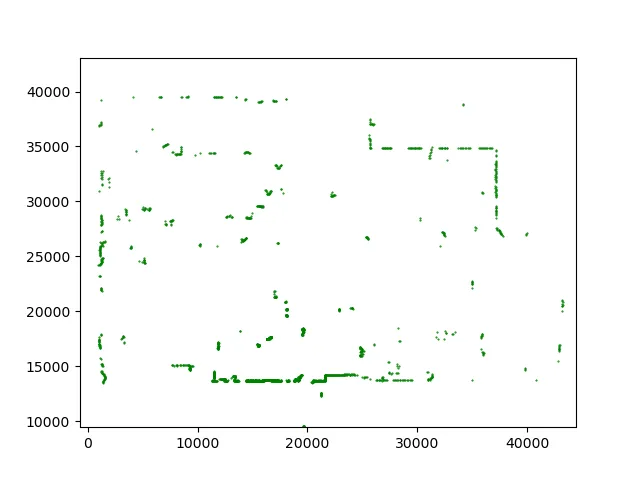
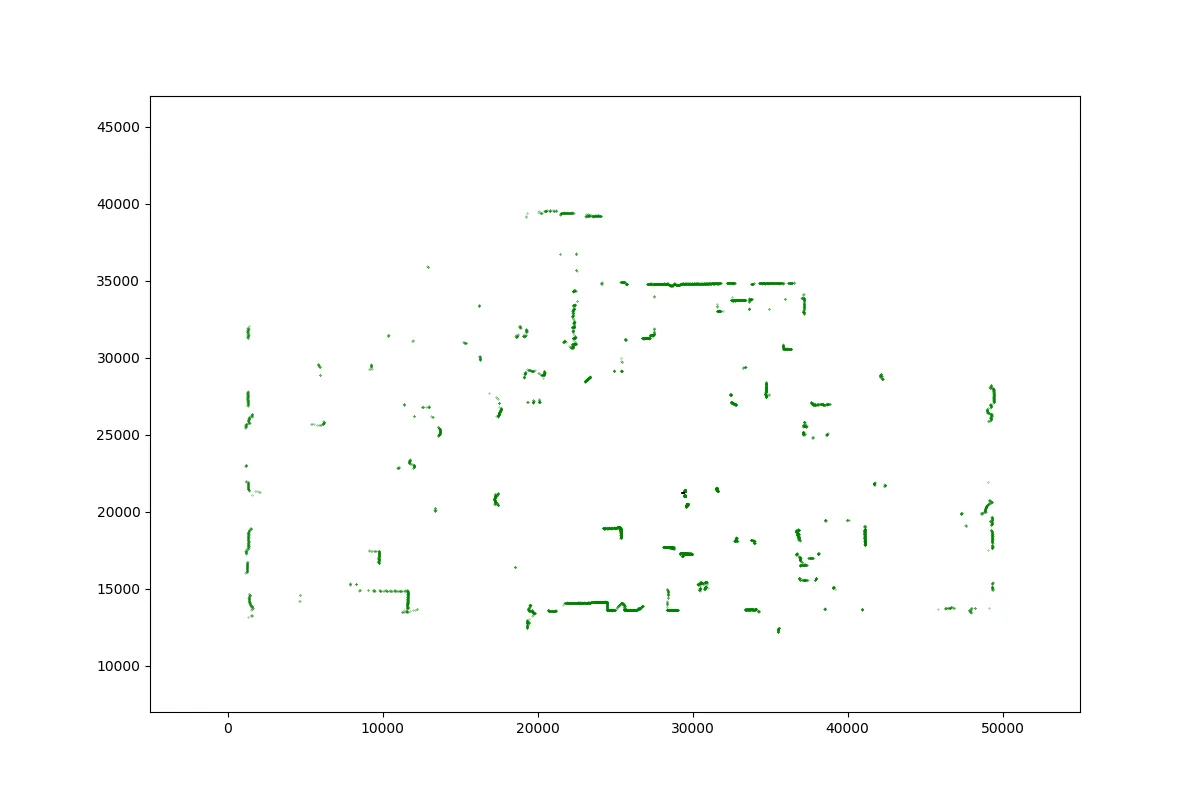
阅读了一些很好的答案后,我觉得我应该更好地描述一下我的意图。我有一个高分辨率2D LiDAR,需要从数据中提取墙壁。典型的扫描可能如下所示:
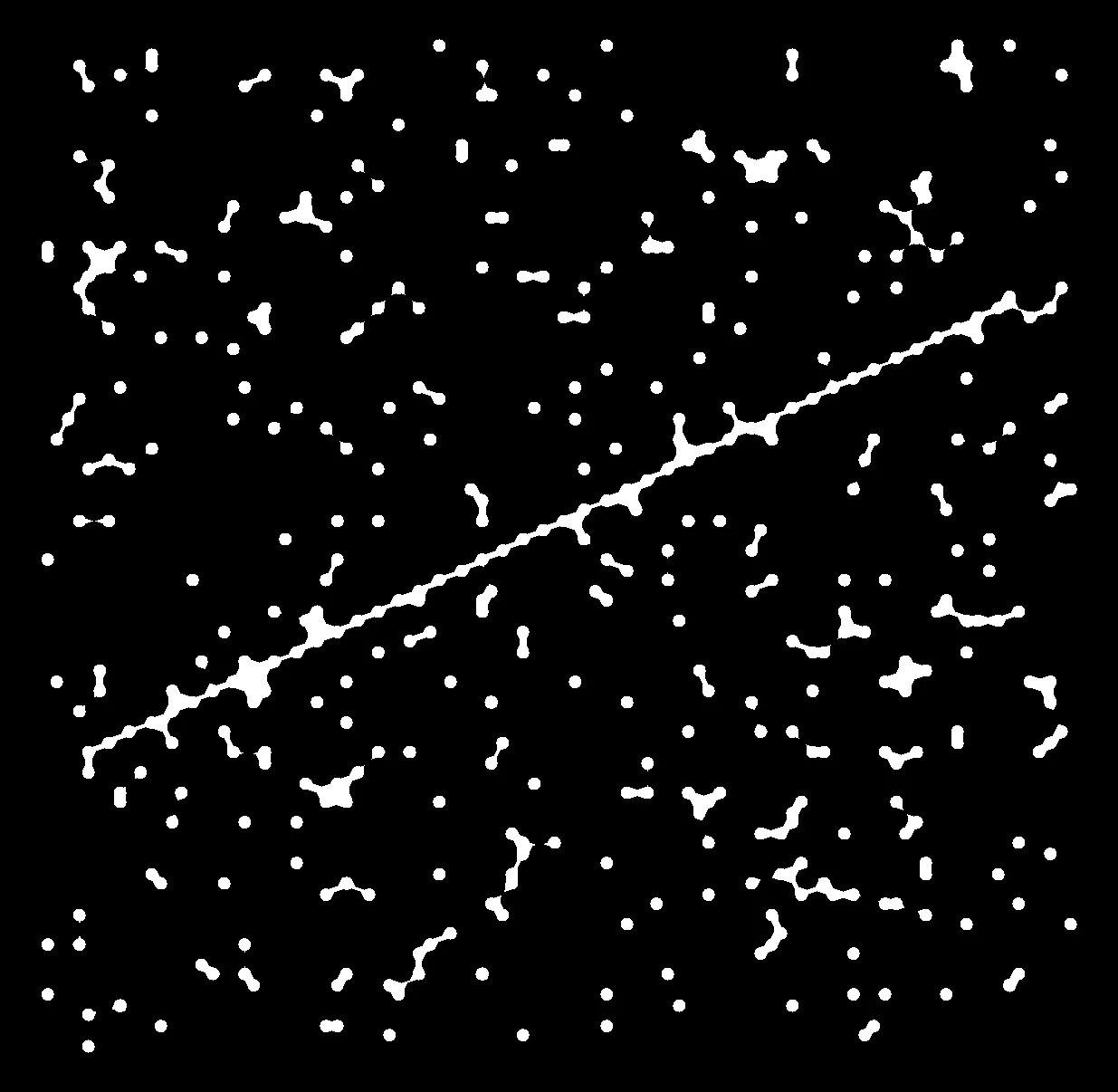
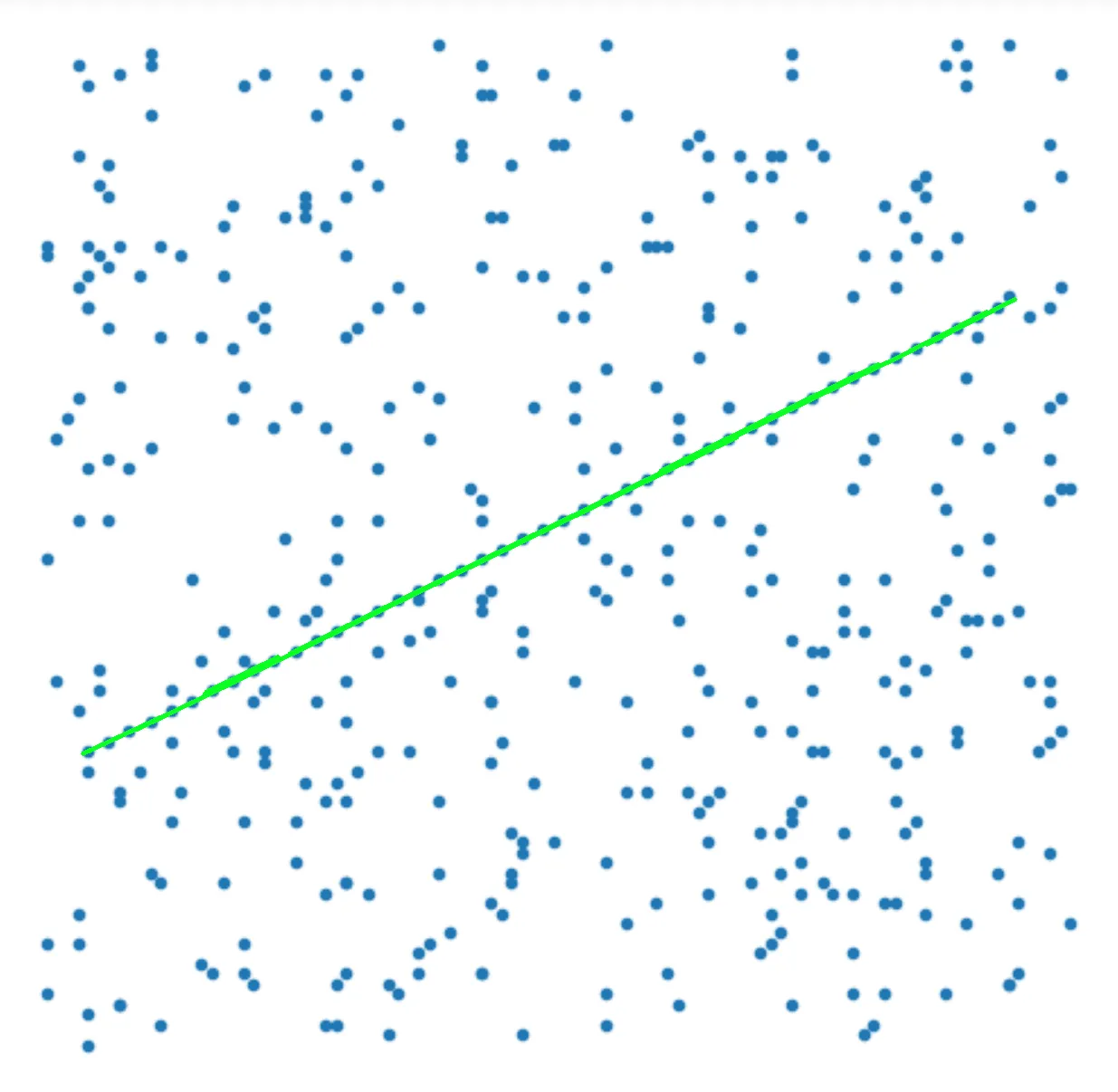
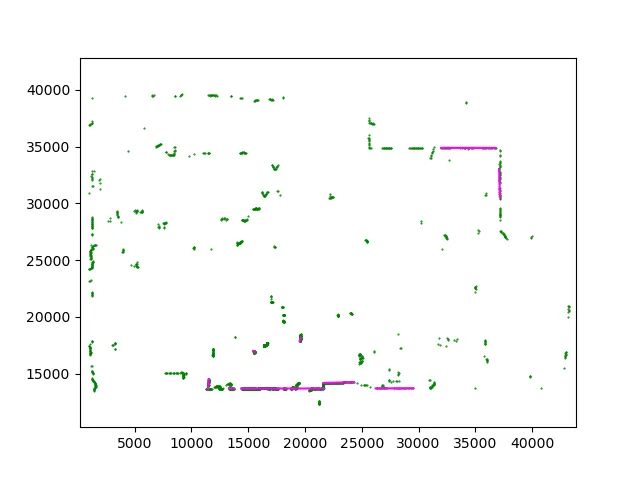
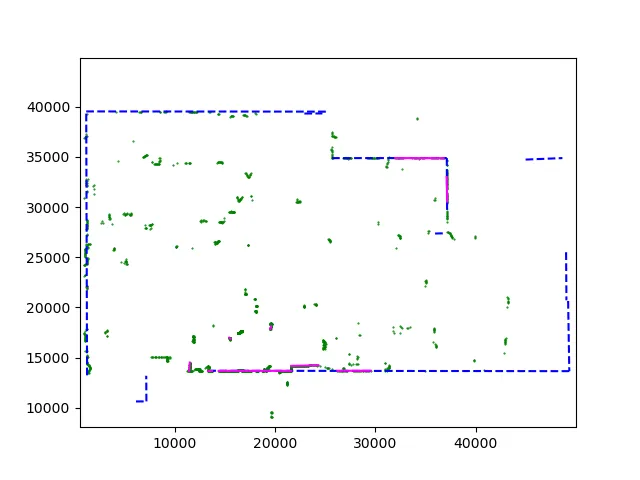
 其中“正确的输出”将类似于:
其中“正确的输出”将类似于: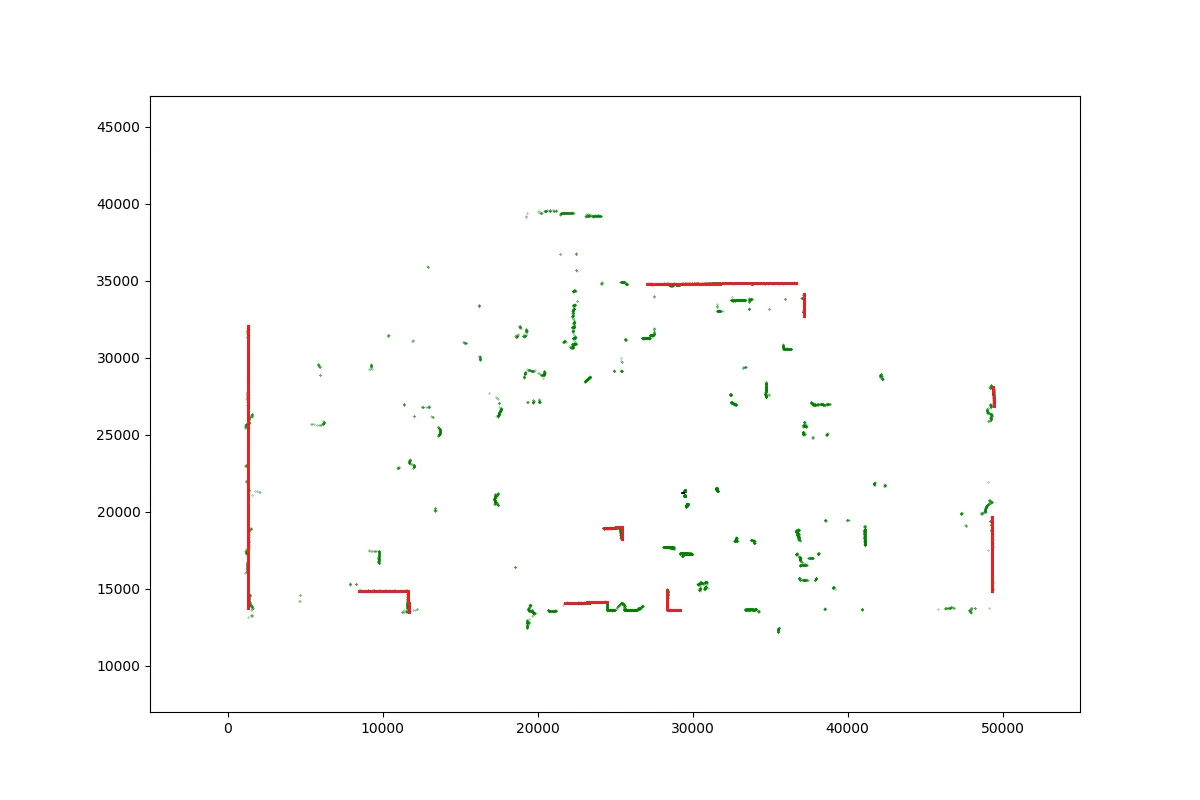 在我做了更多的研究之后,我怀疑在这种情况下使用Hough变换不是最佳选择。有什么提示我应该寻找什么?
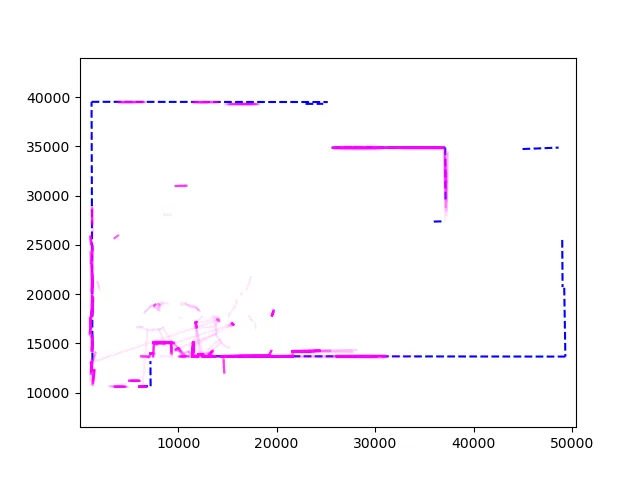
在我做了更多的研究之后,我怀疑在这种情况下使用Hough变换不是最佳选择。有什么提示我应该寻找什么?(如果有人感兴趣,LiDAR和墙面提取用于生成地图和导航机器人。)
谢谢,Jakob