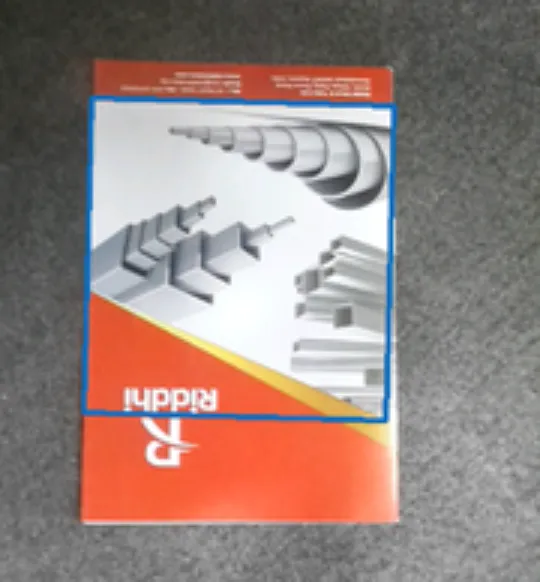
我正在尝试使用OpenCV 4 Android SDK检测矩形文档。首先,我尝试通过查找轮廓来检测它,但对于多颜色文档无法正常工作。您可以查看此链接以获得更好的了解:
detecting multi color document with OpenCV4Android
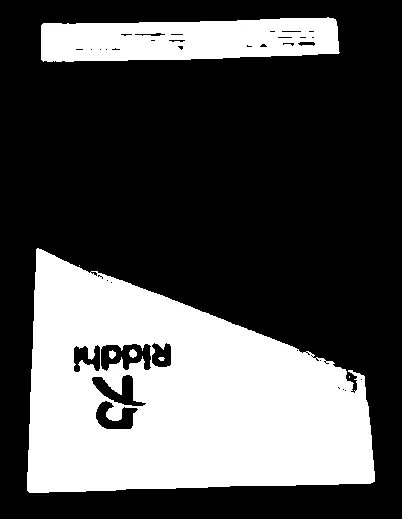
我进行了大量研究,并发现可以使用Hough线变换来完成。因此,我按以下方式检测文档:
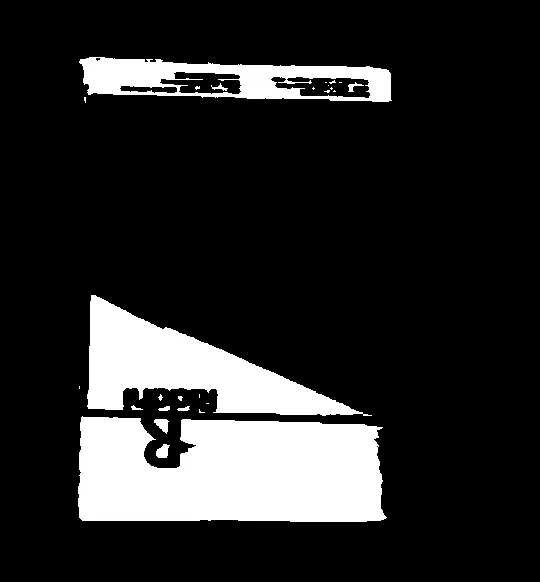
原始图像-> cvtColor-> GaussianBlur滤镜->将其膨胀以增强边缘->应用分水岭图像分割算法->带动态Otsu阈值的Canny边缘检测->然后应用Hough线变换
我所做的Hough线变换是:
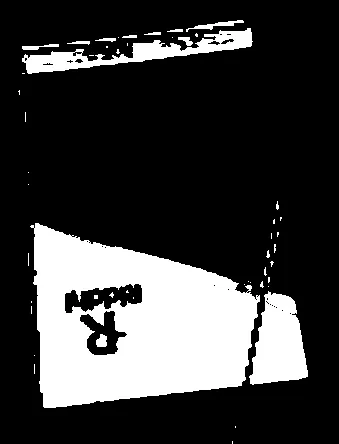
从这四个交点中,我正在绘制线条。到目前为止,我能够通过它检测文档。请参见下面的图像:
原始图像-> cvtColor-> GaussianBlur滤镜->将其膨胀以增强边缘->应用分水岭图像分割算法->带动态Otsu阈值的Canny边缘检测->然后应用Hough线变换
我所做的Hough线变换是:
Imgproc.HoughLinesP(watershedMat, lines, 1, Math.PI / 180, 50, 100, 50);
List<Line> horizontals = new ArrayList<>();
List<Line> verticals = new ArrayList<>();
for (int x = 0; x < lines.rows(); x++)
{
double[] vec = lines.get(x, 0);
double x1 = vec[0],
y1 = vec[1],
x2 = vec[2],
y2 = vec[3];
Point start = new Point(x1, y1);
Point end = new Point(x2, y2);
Line line = new Line(start, end);
if (Math.abs(x1 - x2) > Math.abs(y1-y2)) {
horizontals.add(line);
} else if (Math.abs(x2 - x1) < Math.abs(y2 - y1)){
verticals.add(line);
}
}
从上述水平和垂直线的列表中,我将找到以下交点:
protected Point computeIntersection (Line l1, Line l2) {
double x1 = l1._p1.x, x2= l1._p2.x, y1 = l1._p1.y, y2 = l1._p2.y;
double x3 = l2._p1.x, x4 = l2._p2.x, y3 = l2._p1.y, y4 = l2._p2.y;
double d = (x1 - x2) * (y3 - y4) - (y1 - y2) * (x3 - x4);
// double angle = angleBetween2Lines(l1,l2);
Log.e("houghline","angle between 2 lines = "+angle);
Point pt = new Point();
pt.x = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / d;
pt.y = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / d;
return pt;
}
从这四个交点中,我正在绘制线条。到目前为止,我能够通过它检测文档。请参见下面的图像: