我正在开发一个自动引导车的导航和定位系统,但遇到了一个问题。在制作地图时,重要的部分是找到墙壁。使用LiDAR单元进行导航。
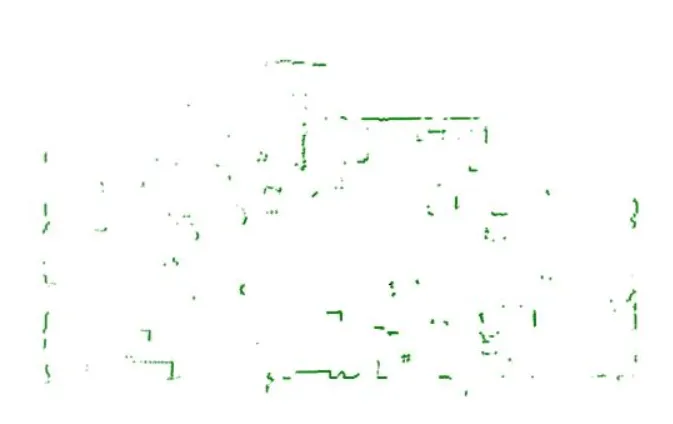
传感器所看到的示例“图像”如下: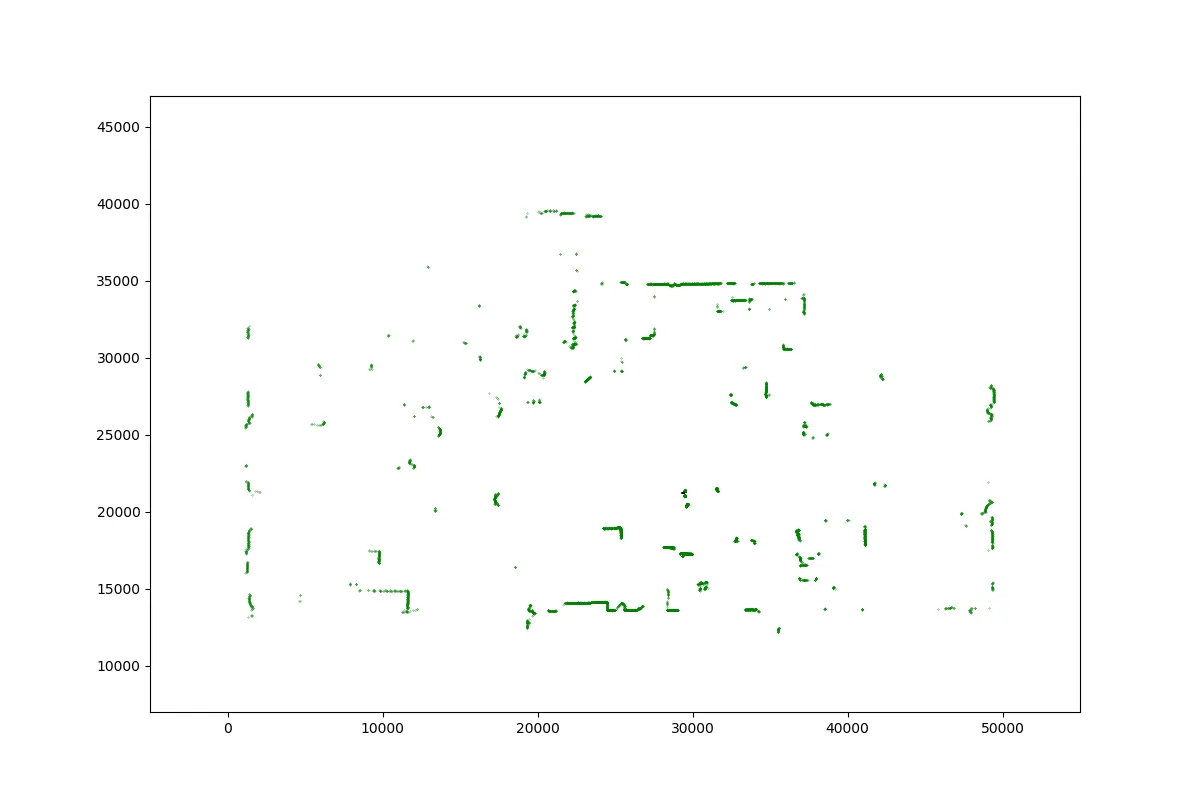 而想要的输出结果类似于这样:
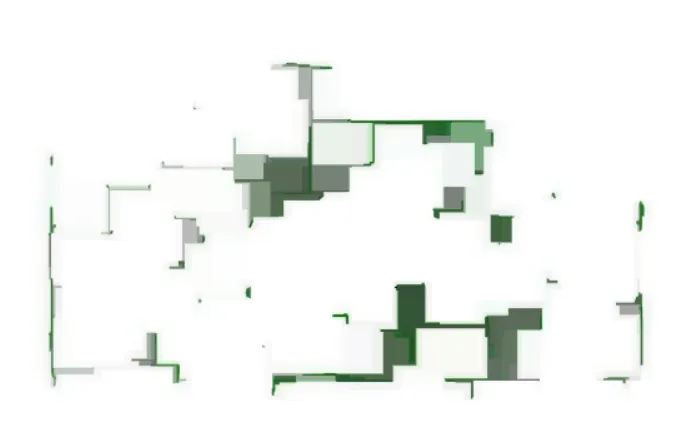
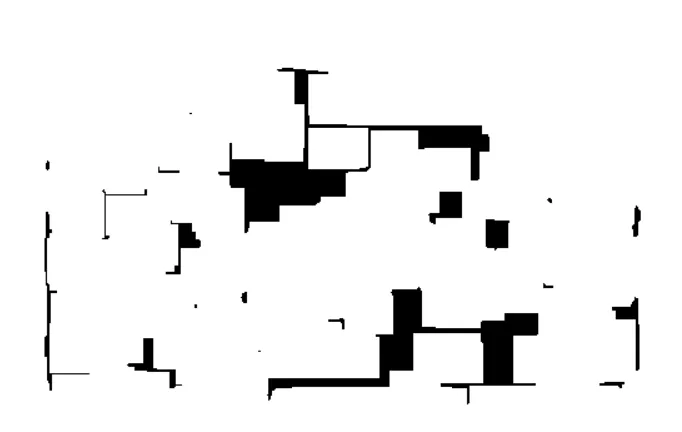
而想要的输出结果类似于这样:
 我已经研究了很多霍夫变换和RANSAC算法,但据我所知,霍夫变换是用于图像的,这对我的情况并不理想,而RANSAC在稀疏数据中找到多个墙壁并不好。
我已经研究了很多霍夫变换和RANSAC算法,但据我所知,霍夫变换是用于图像的,这对我的情况并不理想,而RANSAC在稀疏数据中找到多个墙壁并不好。
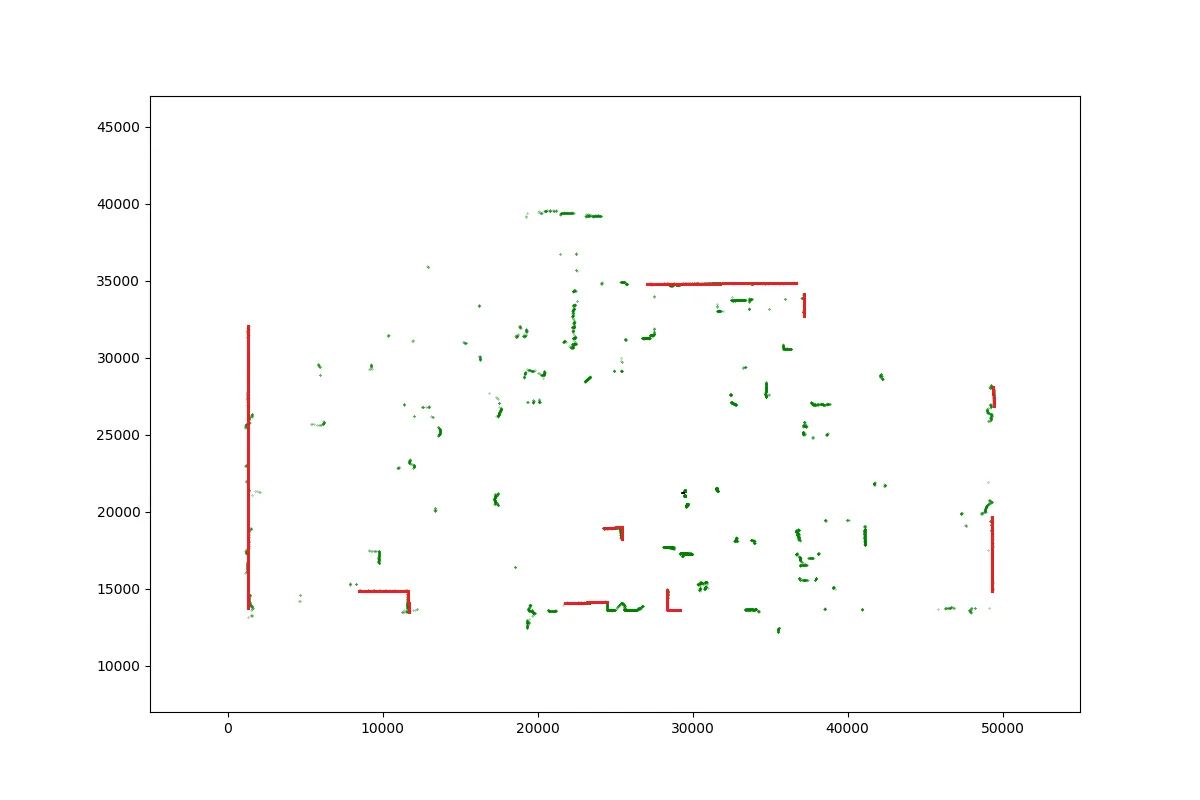
传感器所看到的示例“图像”如下:
而想要的输出结果类似于这样:
我已经研究了很多霍夫变换和RANSAC算法,但据我所知,霍夫变换是用于图像的,这对我的情况并不理想,而RANSAC在稀疏数据中找到多个墙壁并不好。
这个特定示例中使用的数据可以在此链接中找到:https://drive.google.com/file/d/1EnSOr2FYjIdqG1RdFgTkgsoEhVcG7Tl_/view?usp=sharing,文件中的两个数组表示x和y坐标,其中元素按索引对应。
我正在使用Python进行开发,但如果有人知道适合我的算法并且不在任何包中可用,我也可以自己编写它。
提前感谢,Jakob