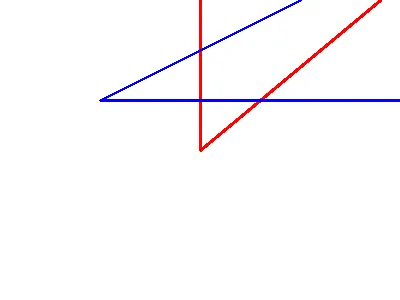
概念
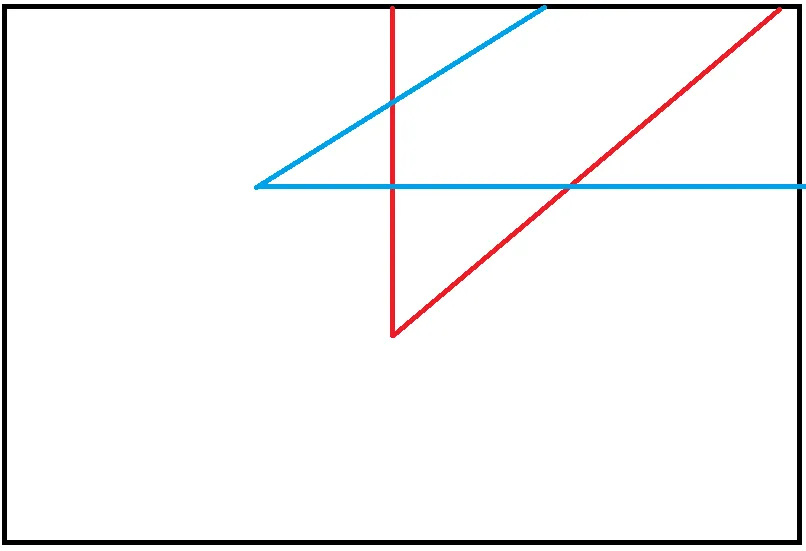
一种简单的检测图像中形状相交的方法是,假设每个形状都有不同的颜色,你可以为每个颜色定义一个掩码,并且使用图像的颜色进行掩蔽,除了具有其颜色的形状之外,检测该形状轮廓的轮廓数量。
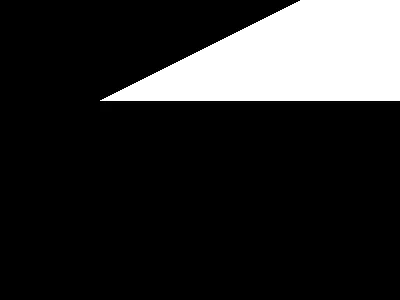
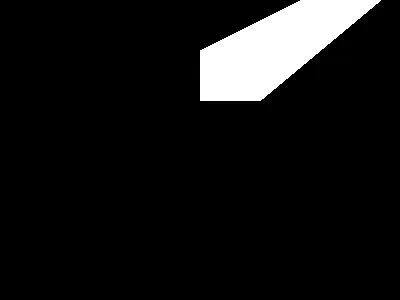
如果发现多个轮廓(面积大于指定量以过滤噪声),那么意味着另一个形状的轮廓与该形状的轮廓相交,留下了空隙导致出现多个轮廓。
代码
import cv2
import numpy as np
def intersected(img, masks):
img_hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
for lower, upper in masks:
mask = cv2.inRange(img_hsv, np.array(lower), np.array(upper))
blur = cv2.GaussianBlur(mask, (5, 5), 0)
canny = cv2.Canny(blur, 0, 0)
contours, _ = cv2.findContours(canny, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
count = 0
for cnt in contours:
if cv2.contourArea(cnt) > 50:
cv2.drawContours(img, [cnt], -1, (0, 255, 0), 1)
cv2.imshow("Test", img)
count += 1
if count == 2:
return True
img = cv2.imread("shapes.png")
blue_mask = [1, 0, 0], [178, 255, 255]
red_mask = [0, 1, 0], [179, 254, 255]
if intersected(img, (blue_mask, red_mask)):
print("Intersection detected!")
else:
print("No intersection detected.")
输出
Intersection detected!
解释
- 导入必要的库:
import cv2
import numpy as np
定义一个函数,它将接受两个参数:我们将检测是否存在形状交集的图像,以及每个形状颜色的HSV掩模数组。
def intersected(img, masks):
- 将图像转换为HSV格式,并循环遍历每个HSV掩模:
img_hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
for lower, upper in masks:
mask = cv2.inRange(img_hsv, np.array(lower), np.array(upper))
4. 模糊掩模以消除噪声,使用Canny边缘检测器检测其边缘,并找到Canny边缘的轮廓:
blur = cv2.GaussianBlur(mask, (5, 5), 0)
canny = cv2.Canny(blur, 0, 0)
contours, _ = cv2.findContours(canny, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
- 定义一个变量
count 来存储已经找到的面积大于50的轮廓数量。如果 count 变量达到了 2,那么我们就知道至少有一个交点被找到了,这足以确认图像中存在交点:
count = 0
for cnt in contours:
if cv2.contourArea(cnt) > 50:
cv2.drawContours(img, [cnt], -1, (0, 255, 0), 1)
cv2.imshow("Test", img)
count += 1
if count == 2:
return True
最后,我们可以在图像上使用该函数:
img = cv2.imread("shapes.png")
blue_mask = [1, 0, 0], [178, 255, 255]
red_mask = [0, 1, 0], [179, 254, 255]
if intersected(img, (blue_mask, red_mask)):
print("Intersection detected!")
else:
print("No intersection detected.")