我正在尝试使用OpenCV从两个立体图像中获取点云数据,但无法获得坐标。
- 我使用光流找到了点的坐标。
- 我找到了相机的投影矩阵。
Mat RT1;<br>
hconcat(R, T1, RT1);<br>
Mat P1 = C*RT1;<br>
R是3x3旋转矩阵,T是3x1变换矩阵(列),P1为投影矩阵。
- 我将它们传递给triangulatePoints函数。
triangulatePoints(P1, P2, leftPoints, rightPoints, out);
P1和P2是3x4投影矩阵(Mat_<double>)。leftPoints和rightPoints是Point2f的std::vector。那么out是什么?它应该是4D坐标的1xN矩阵。这是Vec4f吗?我正在尝试获取坐标。
for (int i = 0; i < out.cols; i++)
{
Vec4f vec = out.at<Vec4f>(0, i);
float w = vec[3];
stream << "v " << vec[0] / w << " " << vec[1]/w << " " << vec[2]/w << "\n";
}
但是我有两个问题:
- 这个循环会抛出异常(对于小的 i,大约 20% 的 out.cols 可以正常运行)
OpenCV 错误:断言失败(dims <= 2 && data && (unsigned)i0 < (unsigned)si ze.p[0] && (unsigned)(i1 * DataType<_Tp>::channels) < (unsigned)(size.p1 * cha nnels()) && ((((sizeof(size_t)<<28)|0x8442211) >> ((DataType<_Tp>::depth) & ((1 << 3) - 1))*4) & 15) == elemSize1())in cv::Mat::at, file c:\opencv\build\includ e\opencv2\core\mat.inl.hpp, line 89
我认为这是一种索引超出范围的异常。
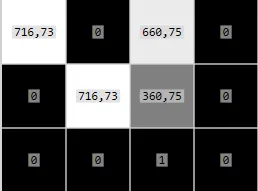
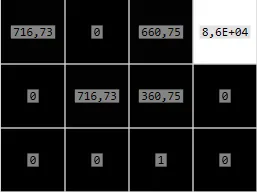
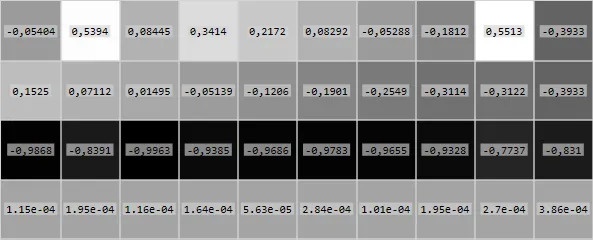
- 结果非常奇怪: 图片
所以,我做错了什么。如何正确地使用此函数并获取点的三维坐标?希望你能帮助我。
{kind=link}