我正在使用Python和PIL来查找640x480图像中各种矩形(和正方形)的重心和旋转角度,类似于这个示例图片: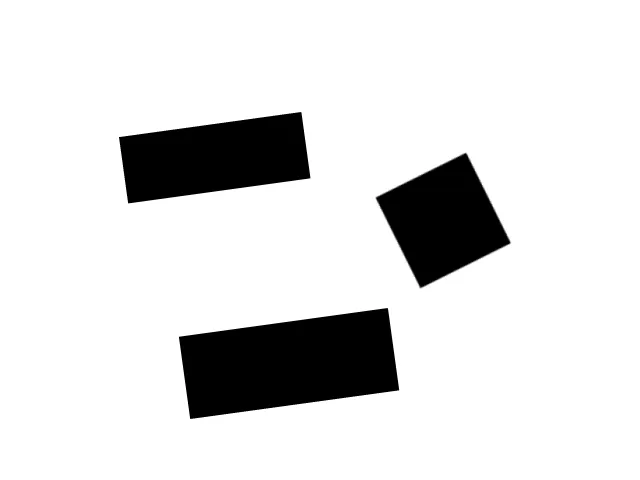
目前,我的代码仅适用于图像中单个矩形的情况。
import Image, math
def find_centroid(im):
width, height = im.size
XX, YY, count = 0, 0, 0
for x in xrange(0, width, 1):
for y in xrange(0, height, 1):
if im.getpixel((x, y)) == 0:
XX += x
YY += y
count += 1
return XX/count, YY/count
#Top Left Vertex
def find_vertex1(im):
width, height = im.size
for y in xrange(0, height, 1):
for x in xrange (0, width, 1):
if im.getpixel((x, y)) == 0:
X1=x
Y1=y
return X1, Y1
#Bottom Left Vertex
def find_vertex2(im):
width, height = im.size
for x in xrange(0, width, 1):
for y in xrange (height-1, 0, -1):
if im.getpixel((x, y)) == 0:
X2=x
Y2=y
return X2, Y2
#Top Right Vertex
def find_vertex3(im):
width, height = im.size
for x in xrange(width-1, 0, -1):
for y in xrange (0, height, 1):
if im.getpixel((x, y)) == 0:
X3=x
Y3=y
return X3, Y3
#Bottom Right Vertex
def find_vertex4 (im):
width, height = im.size
for y in xrange(height-1, 0, -1):
for x in xrange (width-1, 0, -1):
if im.getpixel((x, y)) == 0:
X4=x
Y4=y
return X4, Y4
def find_angle (V1, V2, direction):
side1=math.sqrt(((V1[0]-V2[0])**2))
side2=math.sqrt(((V1[1]-V2[1])**2))
if direction == 0:
return math.degrees(math.atan(side2/side1)), 'Clockwise'
return 90-math.degrees(math.atan(side2/side1)), 'Counter Clockwise'
#Find direction of Rotation; 0 = CW, 1 = CCW
def find_direction (vertices, C):
high=480
for i in range (0,4):
if vertices[i][1]<high:
high = vertices[i][1]
index = i
if vertices[index][0]<C[0]:
return 0
return 1
def main():
im = Image.open('hopperrotated2.png')
im = im.convert('1') # convert image to black and white
print 'Centroid ', find_centroid(im)
print 'Top Left ', find_vertex1 (im)
print 'Bottom Left ', find_vertex2 (im)
print 'Top Right', find_vertex3 (im)
print 'Bottom Right ', find_vertex4 (im)
C = find_centroid (im)
V1 = find_vertex1 (im)
V2 = find_vertex3 (im)
V3 = find_vertex2 (im)
V4 = find_vertex4 (im)
vertices = [V1,V2,V3,V4]
direction = find_direction(vertices, C)
print 'angle: ', find_angle(V1,V2,direction)
if __name__ == '__main__':
main()
我的问题在于当图像中存在多个对象时。
我知道PIL有一个find_edges方法,可以得到仅包含边缘的图像,但我不知道如何使用这个新的边缘图像将图像分割成单独的对象。
from PIL import Image, ImageFilter
im = Image.open('hopperrotated2.png')
im1 = im.filter(ImageFilter.FIND_EDGES)
im1 = im1.convert('1')
print im1
im1.save("EDGES.jpg")
如果我可以使用边缘来将图像分割成单独的矩形,那么我只需要在每个矩形上运行我的第一行代码来获取质心和旋转角度。
但更好的方法是能够使用边缘来计算每个矩形的旋转角度和质心,而无需拆分图像。
非常感谢大家的帮助!
scipy.ndimage,特别是label来检测你的矩形,以及find_objects和center_of_mass。 - deinonychusaur