我该如何计算相机前方物体的角度?我的相机分辨率为1280x1024,镜头的焦距为8mm,CMOS上每个像素的像素大小为4.8微米。从这些参数中肯定可以计算出角度。同时,我已经计算出了物体到相机的距离,并且一切都在同一平面上。因此,只有X坐标是有用的,对吗?
我正在使用OpenCV和Python进行处理。
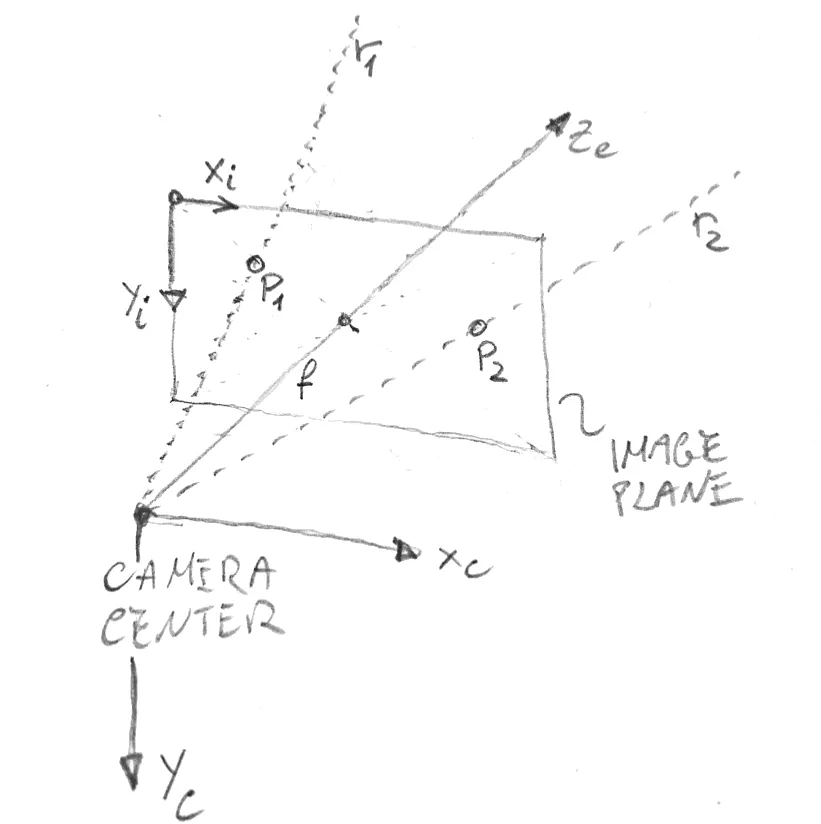
我的想法是使用镜头的焦距与检测到的物体从传感器中心的X偏移量相结合,但是我从中得到的角度很奇怪。
这是角度估计的代码:
首先是点的X坐标,第二个是整个传感器的宽度(1280像素* 4.8um)以毫米为单位,第三个是以毫米为单位的焦距。 角度=(pointInterpolatedX * 6.144)/ 8
能否有人给我帮助?谢谢!
此外,我看了看这里的主题,但我无法完全理解它。我对我的相机有更多信息,而且我的物体只能在2个维度上移动,而不是3个维度。因此,可能有一种聪明的方式来估计它在相机前方地面上的位置。OpenCV有任何我可以使用的功能吗?
我正在使用OpenCV和Python进行处理。
我的想法是使用镜头的焦距与检测到的物体从传感器中心的X偏移量相结合,但是我从中得到的角度很奇怪。
这是角度估计的代码:
首先是点的X坐标,第二个是整个传感器的宽度(1280像素* 4.8um)以毫米为单位,第三个是以毫米为单位的焦距。 角度=(pointInterpolatedX * 6.144)/ 8
能否有人给我帮助?谢谢!
此外,我看了看这里的主题,但我无法完全理解它。我对我的相机有更多信息,而且我的物体只能在2个维度上移动,而不是3个维度。因此,可能有一种聪明的方式来估计它在相机前方地面上的位置。OpenCV有任何我可以使用的功能吗?