我正试图实现一个逆运动学求解器,但这次需要考虑末端执行器的方向。当仅需要位置时,我已经成功了。
我了解到,在这种情况下,可以构建如下雅可比矩阵,其中w_i是全局空间中的第i个旋转轴,p_i是第i个轴到目标位置的向量。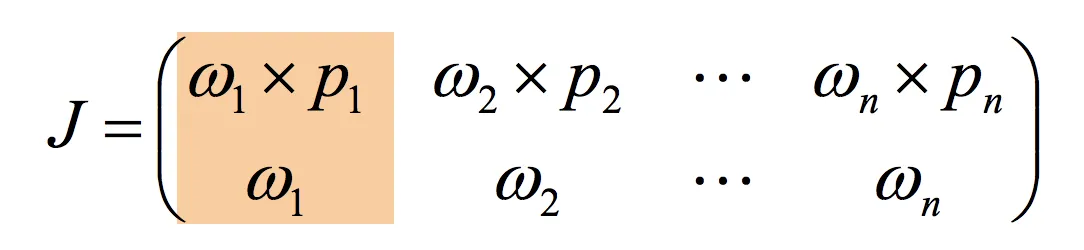 问题在于我必须计算下面方程中的x_dot。
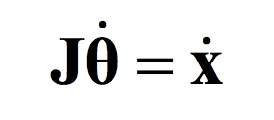
问题在于我必须计算下面方程中的x_dot。
我目前的想法是将当前末端执行器的偏航角、俯仰角和翻滚角与目标的偏航角、俯仰角和翻滚角相减,并将每个结果除以100。但这似乎有点复杂。有没有更好的方法来解决这个问题?任何想法都将不胜感激!
我了解到,在这种情况下,可以构建如下雅可比矩阵,其中w_i是全局空间中的第i个旋转轴,p_i是第i个轴到目标位置的向量。
问题在于我必须计算下面方程中的x_dot。
我目前的想法是将当前末端执行器的偏航角、俯仰角和翻滚角与目标的偏航角、俯仰角和翻滚角相减,并将每个结果除以100。但这似乎有点复杂。有没有更好的方法来解决这个问题?任何想法都将不胜感激!