这是我尝试过的方法。
在图片中,背景大部分都是绿色的,并且背景区域比前景区域要大得多。因此,如果你对图像进行颜色直方图处理,绿色的条柱将有更高的数值。将这个直方图阈值化以便数值较小的条柱被设为零。这样做我们很可能会保留绿色(数值较高)条柱并且丢弃其他颜色。然后对这个直方图进行反向投影处理。反向投影处理将会突出显示图像中这些绿色区域。
反向投影:

背景(经过一些形态学滤波之后):
前景(经过一些形态学滤波之后):

我认为这样得到的分割结果还比较合理,使用这个作为掩膜,你或许可以使用像 GrabCut 这样的分割算法来进一步完善边界(我还没有尝试过)。
EDIT:
我尝试了一下 GrabCut 方法,它确实可以完善边界。我已经添加了 GrabCut 分割的代码。
轮廓:
使用前景作为掩膜的 GrabCut 分割:
在直方图处理部分,我使用了 OpenCV 的 C API。
// load the color image
IplImage* im = cvLoadImage("bFly6.jpg");
// get the color histogram
IplImage* im32f = cvCreateImage(cvGetSize(im), IPL_DEPTH_32F, 3);
cvConvertScale(im, im32f);
int channels[] = {0, 1, 2};
int histSize[] = {32, 32, 32};
float rgbRange[] = {0, 256};
float* ranges[] = {rgbRange, rgbRange, rgbRange};
CvHistogram* hist = cvCreateHist(3, histSize, CV_HIST_ARRAY, ranges);
IplImage* b = cvCreateImage(cvGetSize(im32f), IPL_DEPTH_32F, 1);
IplImage* g = cvCreateImage(cvGetSize(im32f), IPL_DEPTH_32F, 1);
IplImage* r = cvCreateImage(cvGetSize(im32f), IPL_DEPTH_32F, 1);
IplImage* backproject32f = cvCreateImage(cvGetSize(im), IPL_DEPTH_32F, 1);
IplImage* backproject8u = cvCreateImage(cvGetSize(im), IPL_DEPTH_8U, 1);
IplImage* bw = cvCreateImage(cvGetSize(im), IPL_DEPTH_8U, 1);
IplConvKernel* kernel = cvCreateStructuringElementEx(3, 3, 1, 1, MORPH_ELLIPSE);
cvSplit(im32f, b, g, r, NULL);
IplImage* planes[] = {b, g, r};
cvCalcHist(planes, hist);
// find min and max values of histogram bins
float minval, maxval;
cvGetMinMaxHistValue(hist, &minval, &maxval);
// threshold the histogram. this sets the bin values that are below the threshold to zero
cvThreshHist(hist, maxval/32);
// backproject the thresholded histogram. backprojection should contain higher values for the
// background and lower values for the foreground
cvCalcBackProject(planes, backproject32f, hist);
// convert to 8u type
double min, max;
cvMinMaxLoc(backproject32f, &min, &max);
cvConvertScale(backproject32f, backproject8u, 255.0 / max);
// threshold backprojected image. this gives us the background
cvThreshold(backproject8u, bw, 10, 255, CV_THRESH_BINARY);
// some morphology on background
cvDilate(bw, bw, kernel, 1);
cvMorphologyEx(bw, bw, NULL, kernel, MORPH_CLOSE, 2);
// get the foreground
cvSubRS(bw, cvScalar(255, 255, 255), bw);
cvMorphologyEx(bw, bw, NULL, kernel, MORPH_OPEN, 2);
cvErode(bw, bw, kernel, 1);
// find contours of the foreground
//CvMemStorage* storage = cvCreateMemStorage(0);
//CvSeq* contours = 0;
//cvFindContours(bw, storage, &contours);
//cvDrawContours(im, contours, CV_RGB(255, 0, 0), CV_RGB(0, 0, 255), 1, 2);
// grabcut
Mat color(im);
Mat fg(bw);
Mat mask(bw->height, bw->width, CV_8U);
mask.setTo(GC_PR_BGD);
mask.setTo(GC_PR_FGD, fg);
Mat bgdModel, fgdModel;
grabCut(color, mask, Rect(), bgdModel, fgdModel, GC_INIT_WITH_MASK);
Mat gcfg = mask == GC_PR_FGD;
vector<vector<cv::Point>> contours;
vector<Vec4i> hierarchy;
findContours(gcfg, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, cv::Point(0, 0));
for(int idx = 0; idx < contours.size(); idx++)
{
drawContours(color, contours, idx, Scalar(0, 0, 255), 2);
}
// cleanup ...
更新: 我们可以使用下面展示的 C++ 接口来完成上述操作。
const int channels[] = {0, 1, 2};
const int histSize[] = {32, 32, 32};
const float rgbRange[] = {0, 256};
const float* ranges[] = {rgbRange, rgbRange, rgbRange};
Mat hist;
Mat im32fc3, backpr32f, backpr8u, backprBw, kernel;
Mat im = imread("bFly6.jpg");
im.convertTo(im32fc3, CV_32FC3);
calcHist(&im32fc3, 1, channels, Mat(), hist, 3, histSize, ranges, true, false);
calcBackProject(&im32fc3, 1, channels, hist, backpr32f, ranges);
double minval, maxval;
minMaxIdx(backpr32f, &minval, &maxval);
threshold(backpr32f, backpr32f, maxval/32, 255, THRESH_TOZERO);
backpr32f.convertTo(backpr8u, CV_8U, 255.0/maxval);
threshold(backpr8u, backprBw, 10, 255, THRESH_BINARY);
kernel = getStructuringElement(MORPH_ELLIPSE, Size(3, 3));
dilate(backprBw, backprBw, kernel);
morphologyEx(backprBw, backprBw, MORPH_CLOSE, kernel, Point(-1, -1), 2);
backprBw = 255 - backprBw;
morphologyEx(backprBw, backprBw, MORPH_OPEN, kernel, Point(-1, -1), 2);
erode(backprBw, backprBw, kernel);
Mat mask(backpr8u.rows, backpr8u.cols, CV_8U);
mask.setTo(GC_PR_BGD);
mask.setTo(GC_PR_FGD, backprBw);
Mat bgdModel, fgdModel;
grabCut(im, mask, Rect(), bgdModel, fgdModel, GC_INIT_WITH_MASK);
Mat fg = mask == GC_PR_FGD;
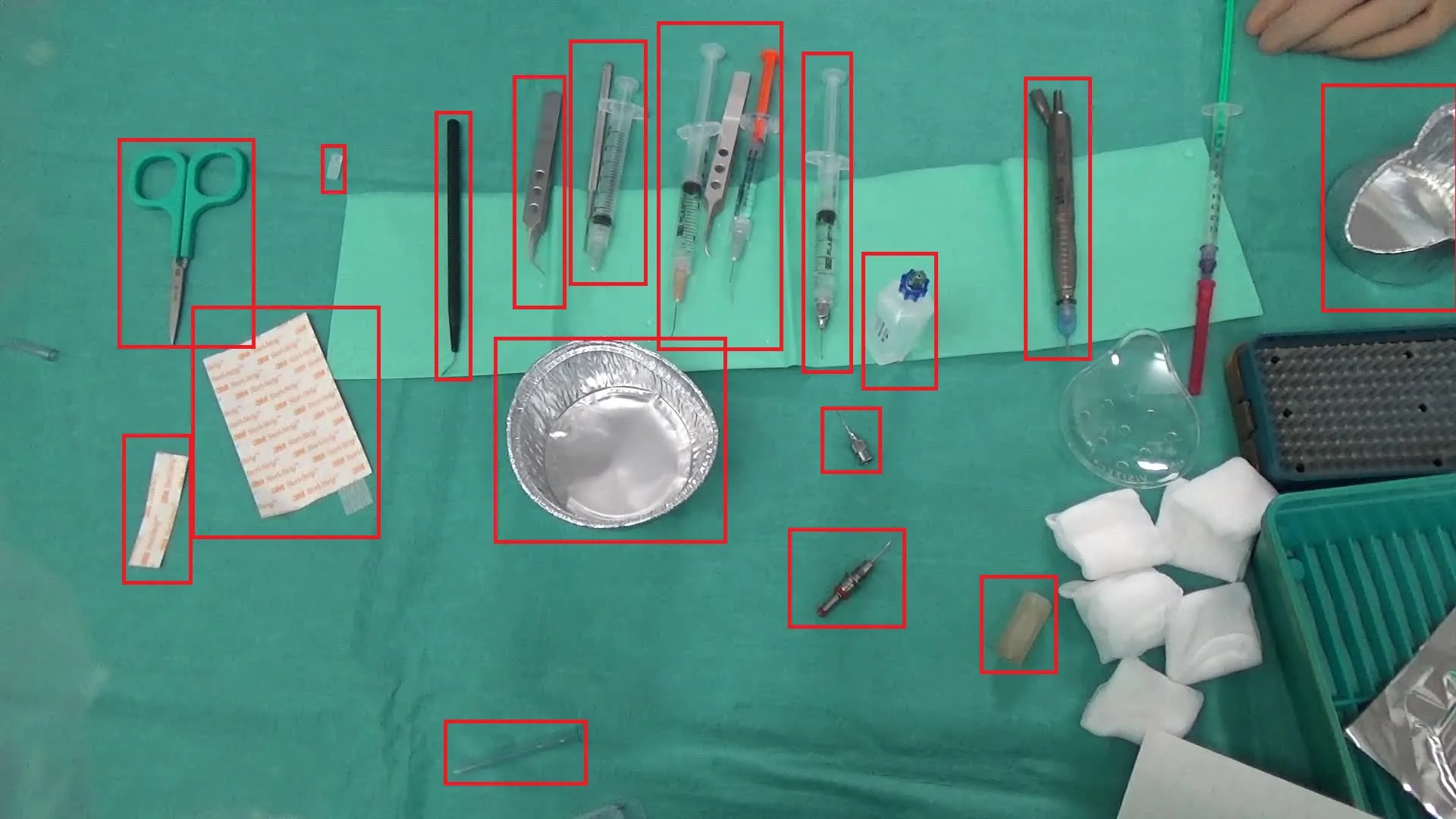
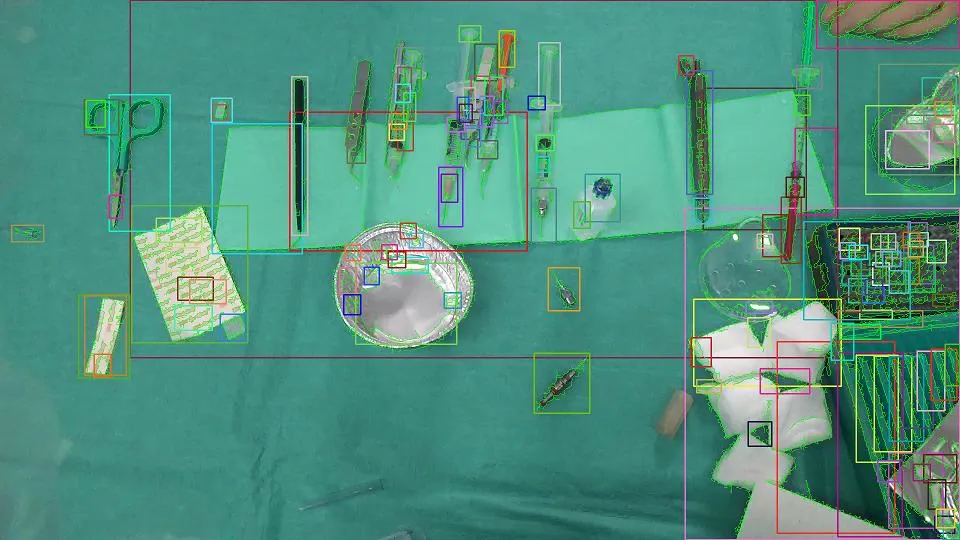
 我们正在按照以下步骤进行:
我们正在按照以下步骤进行: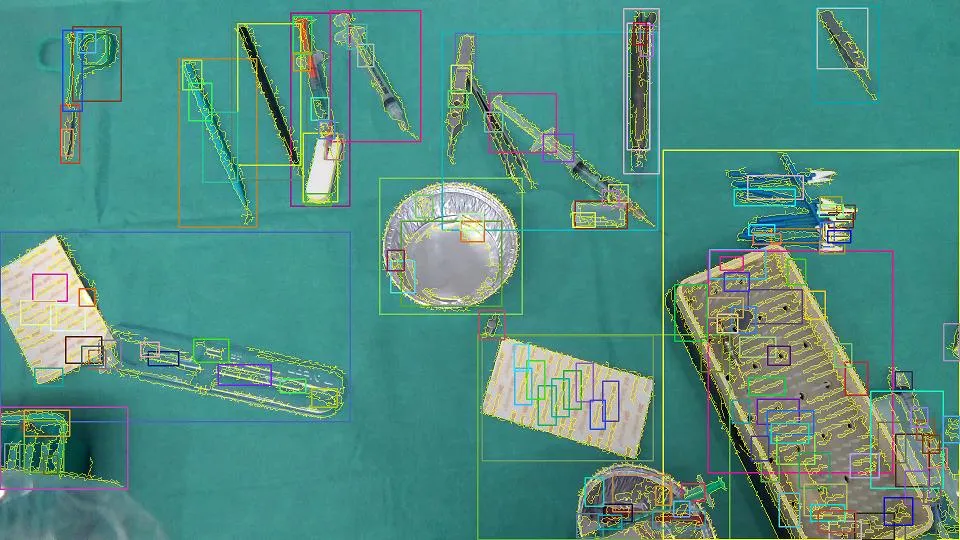 黄色边框是检测到的连接组件,矩形只是为了突出显示连接组件的存在。为了得到可理解的结果,我们只需删除完全位于任何其他组件内部的连接组件,因此最终结果如下所示:
黄色边框是检测到的连接组件,矩形只是为了突出显示连接组件的存在。为了得到可理解的结果,我们只需删除完全位于任何其他组件内部的连接组件,因此最终结果如下所示:
 到目前为止,一切都很好,但另一个图片样本却让我们的工作变得复杂。
到目前为止,一切都很好,但另一个图片样本却让我们的工作变得复杂。
 在物体下放置小型浅绿色毛巾得到此图像:
在物体下放置小型浅绿色毛巾得到此图像:
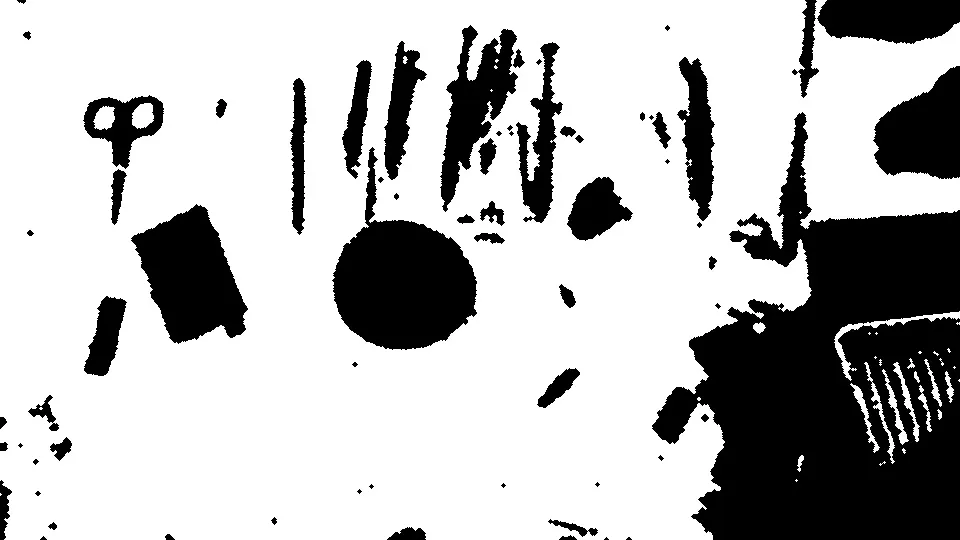
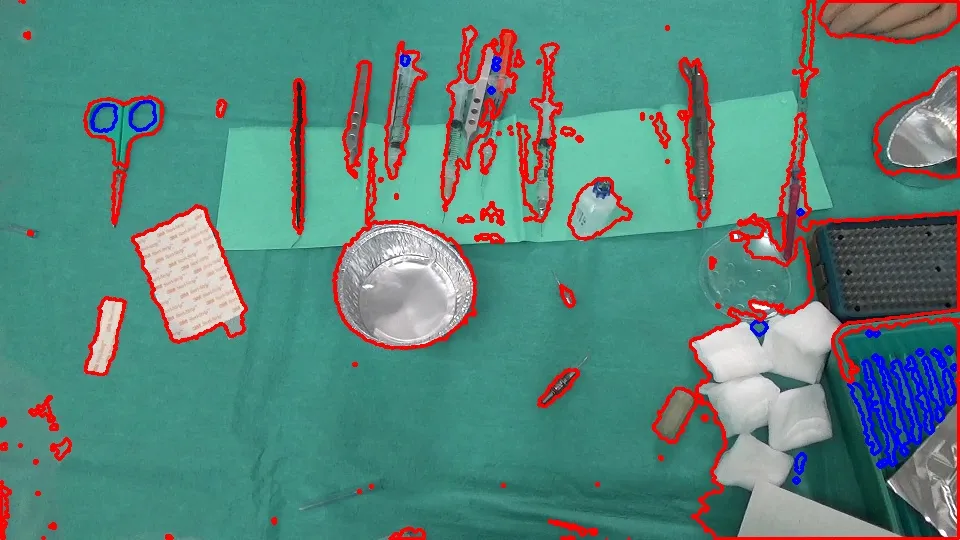
 在过滤区域时,我们之前采用的方法不再奏效,所以我们得到了这个结果:
在过滤区域时,我们之前采用的方法不再奏效,所以我们得到了这个结果:
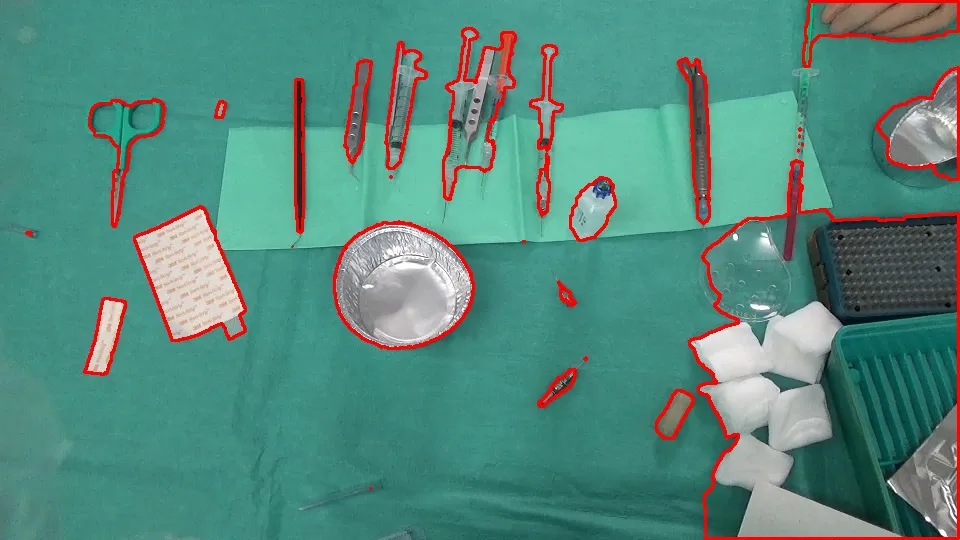
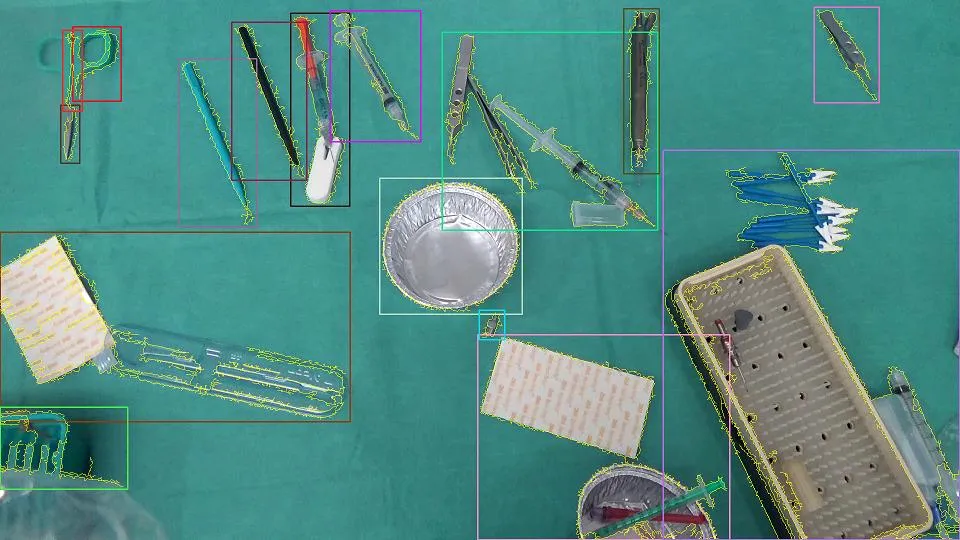
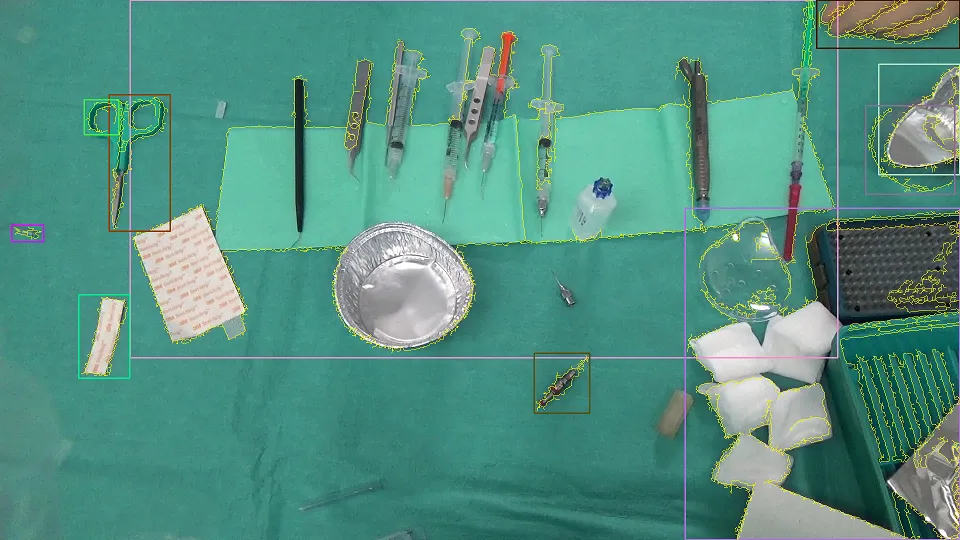 显然,这不是我们需要的结果。我们期望得到像这样的结果:
显然,这不是我们需要的结果。我们期望得到像这样的结果: