由于没有人发布完整的OpenCV解决方案,这里提供一个简单的方法:
获取二进制图像。 我们加载图像,将其转换为灰度图像,然后使用Otsu阈值获得二进制图像
查找外轮廓。 我们使用findContours查找轮廓,然后使用boundingRect提取边界框坐标
查找中心坐标。 由于我们有轮廓,因此可以使用moments提取轮廓的质心来查找中心坐标
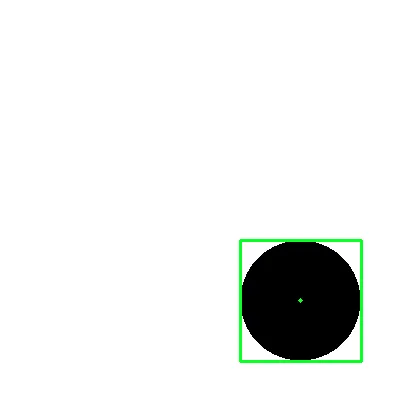
这是一个带有边界框和中心点高亮显示的示例,如下所示:
输入图像 -> 输出
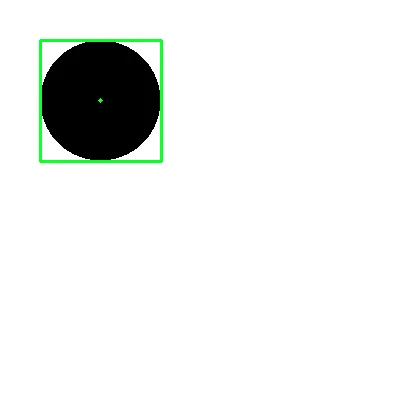
Center: (100, 100)
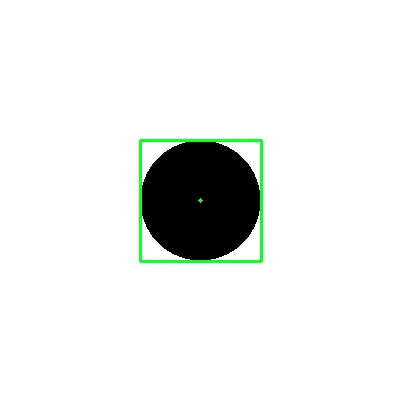
Center: (200, 200)
Center: (300, 300)
总结一下:
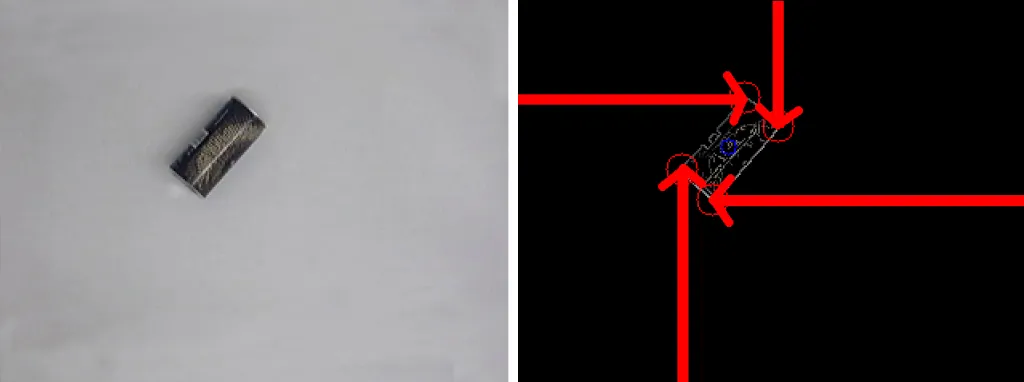
在一个纯白背景上给定一个物体,是否有人知道OpenCV是否提供了从捕获的帧中轻松检测对象的功能?
首先获取二进制图像(Canny边缘检测, 简单阈值处理, Otsu阈值处理 或 自适应阈值处理),然后使用 findContours 查找轮廓。要获取边界矩形坐标,可以使用 boundingRect,它将以 x,y,w,h 的形式给出坐标。要绘制矩形,可以使用 rectangle 进行绘制。这将给出轮廓的四个角点。如果要获取中心点,请使用 moments 提取轮廓的质心。
代码
import cv2
import numpy as np
image = cv2.imread('1.png')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
cnts = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
for c in cnts:
x,y,w,h = cv2.boundingRect(c)
cv2.rectangle(image, (x, y), (x + w, y + h), (36,255,12), 2)
M = cv2.moments(c)
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
cv2.circle(image, (cx, cy), 2, (36,255,12), -1)
print('Center: ({}, {})'.format(cx,cy))
cv2.imshow('image', image)
cv2.waitKey()
{kind=link}