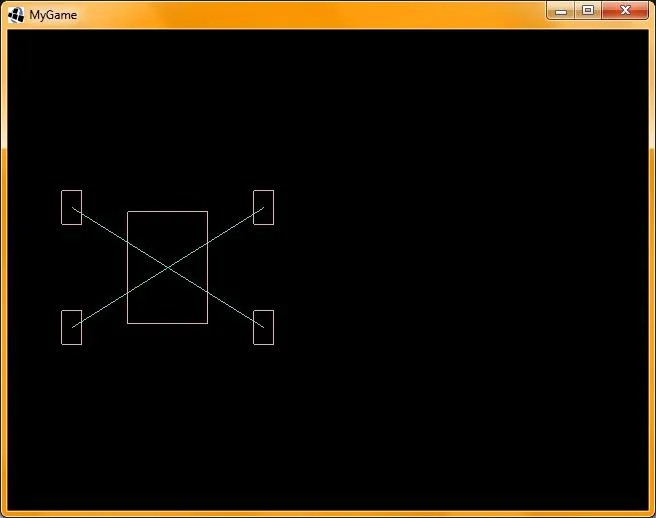
我正在尝试实现一个Java版本的基于Emanuele Feronato的“Two ways to make Box2D cars”的上向汽车游戏。我了解一些box2d的基础知识,并且大部分代码已经转换为Java,只有少数例外。
然而,当我运行程序时,我的汽车根本不动。
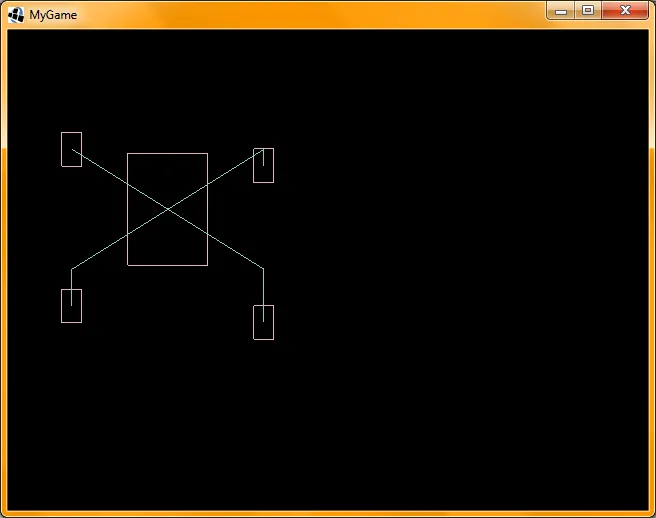
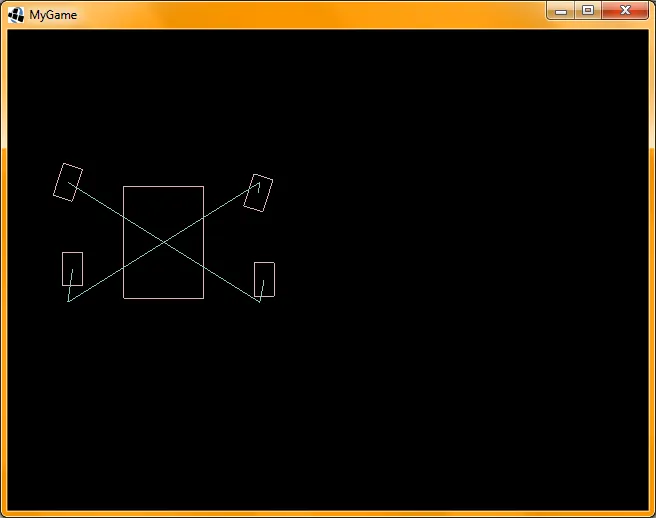
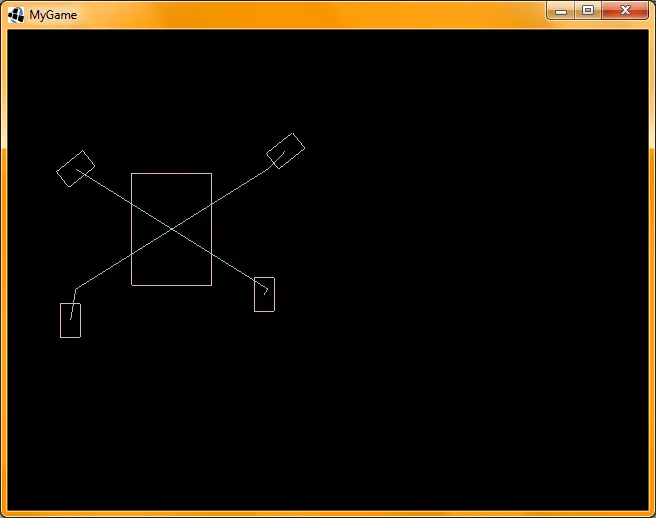
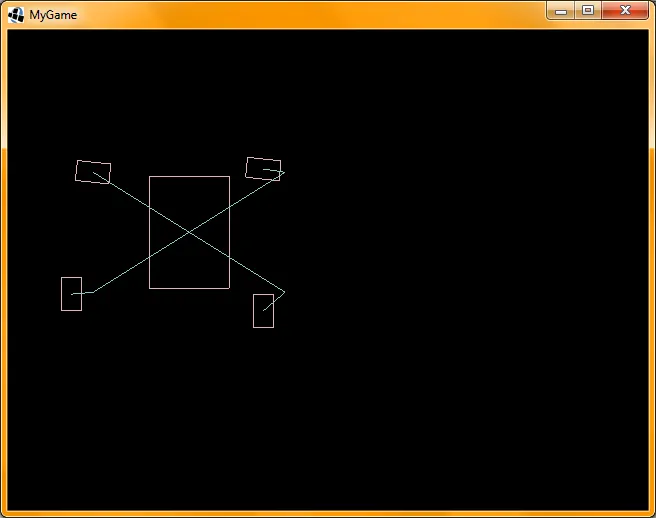
如果我将所有内容都设置为动态体,则除左前轮外的所有车轮都会开始前后移动,将汽车前后抛来抛去,但最终没有任何作用。前两个关节是旋转关节,每个关节都有电机,而后面的关节则是棱柱形的,所以请纠正我如果我错了,前两个应该是唯一“旋转”/移动的。我感觉自己做错了什么,但是无论我看哪里,都是在动作脚本中,所以我不确定出了什么问题。
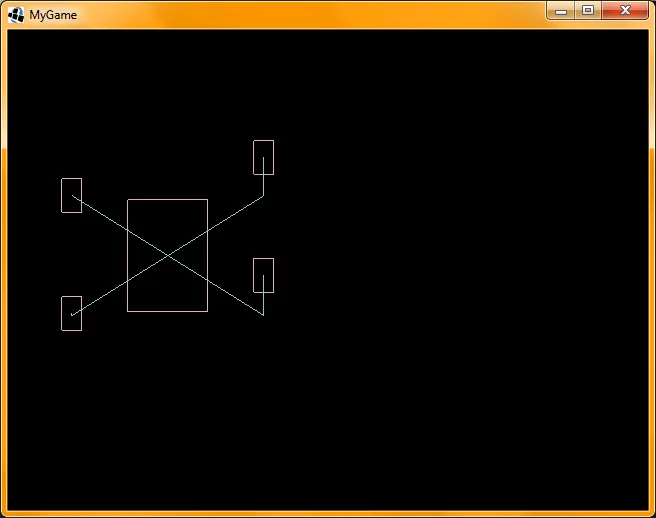
我已经检查过,所有的轮子都在正确的位置,关节也放置在正确的轮子上。我已经检查了电机转速,它也在运行。我的“ldirection”和“rdirection”的x分量始终为0,因此它会减少横向速度,而y则始终是一个值。所以它应该向前移动,对吧?
左前轮与车身保持相同的距离,随着车身的升降保持不变。因此,左前轮似乎正常工作。我检查了所有的代码,确保右前轮与左轮相同。
启动汽车
当加速向前时,只有两个右轮和后左轮来回移动。
初始化
this.world = new World(new Vector2(0, 0), false);
this.box2Drender = new Box2DDebugRenderer();
this.LeftPJointDef = new PrismaticJointDef();
this.RightPJointDef = new PrismaticJointDef();
this.RightJointDef = new RevoluteJointDef();
this.LeftJointDef = new RevoluteJointDef();
this.CarBody = new PolygonShape();
this.RightRWheelShape = new PolygonShape();
this.RightFWheelShape = new PolygonShape();
this.LeftRWheelShape = new PolygonShape();
this.LeftFWheelShape = new PolygonShape();
this.LeftRWheelDef = new BodyDef();
this.RightRWheelDef = new BodyDef();
this.RightFWheelDef = new BodyDef();
this.LeftFWheelDef = new BodyDef();
this.bodyD = new BodyDef();
this.CarFixDef = new FixtureDef();
this.x = x;
this.y = y;
this.Cpos = new Vector2(x,y);
this.RRW = new Vector2((this.x + (this.x * XPrc)), (this.y + (this.y * -YPrc)));
this.RLW = new Vector2((this.x + (this.x * -XPrc)), (this.y + (this.y * -YPrc)));
this.FRW = new Vector2((this.x + (this.x * XPrc)), (this.y + (this.y * YPrc)));
this.FLW = new Vector2((this.x + (this.x * -XPrc)), (this.y + (this.y * YPrc)));
this.WheelSizeX = this.width * 0.25f;
this.WheelSizeY = this.length * 0.30f;
//setting bodyDef damping
bodyD.linearDamping = 0.5f;
bodyD.angularDamping = 0.5f;
//Adding bodyDef to the world and setting type as Dynamic
body = world.createBody(bodyD);
body.setType(BodyDef.BodyType.DynamicBody);
//setting the body position in the world using the Vector given.
body.setTransform(this.Cpos, (float) ((Math.PI) / 2));
//Adding the calculated Position vecotrs of the wheel's to each wheel def.
RightFWheelDef.position.add(FRW);
LeftFWheelDef.position.add(FLW);
RightRWheelDef.position.add(RRW);
LeftRWheelDef.position.add(RLW);
//Adding the wheels to the world using the Wheel Defs.
RightFWheel = world.createBody(RightFWheelDef);
LeftFWheel = world.createBody(LeftFWheelDef);
RightRWheel = world.createBody(RightRWheelDef);
LeftRWheel = world.createBody(LeftRWheelDef);
RightFWheel.setType(BodyDef.BodyType.DynamicBody);
RightRWheel.setType(BodyDef.BodyType.DynamicBody);
LeftFWheel.setType(BodyDef.BodyType.DynamicBody);
LeftRWheel.setType(BodyDef.BodyType.DynamicBody);
//Setting the car(box) and wheel size
CarBody.setAsBox(this.length, this.width);
LeftFWheelShape.setAsBox(WheelSizeX, WheelSizeY);
LeftRWheelShape.setAsBox(WheelSizeX, WheelSizeY);
RightRWheelShape.setAsBox(WheelSizeX, WheelSizeY);
RightFWheelShape.setAsBox(WheelSizeX, WheelSizeY);
CarFixDef.shape = CarBody;
RightFWheel.createFixture(RightFWheelShape, 1);
RightRWheel.createFixture(RightRWheelShape, 1);
LeftFWheel.createFixture(LeftFWheelShape, 1);
LeftRWheel.createFixture(LeftRWheelShape, 1);
body.createFixture(CarFixDef);
LeftJointDef.enableMotor = true;
RightJointDef.enableMotor = true;
LeftJointDef.maxMotorTorque = 500;
RightJointDef.maxMotorTorque = 500;
//Setting Front Wheel joints in respects to the wheels and body
LeftJointDef.initialize(body, LeftFWheel, LeftFWheel.getWorldCenter());
RightJointDef.initialize(body, RightFWheel, RightFWheel.getWorldCenter());
this.LeftJoint = (RevoluteJoint) world.createJoint(LeftJointDef);
this.RightJoint = (RevoluteJoint) world.createJoint(RightJointDef);
LeftPJointDef.enableLimit = true;
RightPJointDef.enableLimit = true;
//Translation Limit
LeftPJointDef.lowerTranslation = 0;
LeftPJointDef.upperTranslation = 0;
RightPJointDef.lowerTranslation = 0;
RightPJointDef.upperTranslation = 0;
//Setting Rear wheel joints in respects to wheel and body
LeftPJointDef.initialize(body, LeftRWheel, LeftRWheel.getWorldCenter(), new Vector2(1, 0));
RightPJointDef.initialize(body, RightRWheel, RightRWheel.getWorldCenter(), new Vector2(1, 0));
//adding the P Joints to the world.
this.LeftPJoint = (PrismaticJoint) world.createJoint(LeftPJointDef);
this.RightPJoint = (PrismaticJoint) world.createJoint(RightPJointDef);
这是我的更新方法。
KillOrthoVelocity(LeftFWheel);
KillOrthoVelocity(RightFWheel);
KillOrthoVelocity(LeftRWheel);
KillOrthoVelocity(RightRWheel);
//Driving
float r1 = LeftFWheel.getTransform().getRotation();
Vector2 ldirection = new Vector2((float) -Math.sin(r1), (float) Math.cos(r1));
ldirection.scl(enginespeed);
float r2 = RightFWheel.getTransform().getRotation();
Vector2 rdirection = new Vector2((float) -Math.sin(r2), (float) Math.cos(r2));
rdirection.scl(enginespeed);
LeftFWheel.applyForce(ldirection, LeftFWheel.getPosition(), true);
RightFWheel.applyForce(rdirection, RightFWheel.getPosition(), true);
//Steering
float movespeed;
movespeed = steerAng - LeftJoint.getJointAngle();
LeftJoint.setMotorSpeed(movespeed * AngleSpeed);
movespeed = steerAng - RightJoint.getJointAngle();
RightJoint.setMotorSpeed(movespeed * AngleSpeed);
world.step(dt, 6, 2);
通过KillOrthoVelocity类似于获取“ldirection”
Vector2 localP = new Vector2(0, 0);
Vector2 velocity = body.getLinearVelocityFromLocalPoint(localP);
float r = body.getTransform().getRotation();
Vector2 sideways = new Vector2((float) -Math.sin(r), (float) Math.cos(r));
sideways.scl(velocity.dot(sideways));
body.setLinearVelocity(sideways);
任何建议都将不胜感激!即使只是一个线索也会非常有帮助!谢谢!