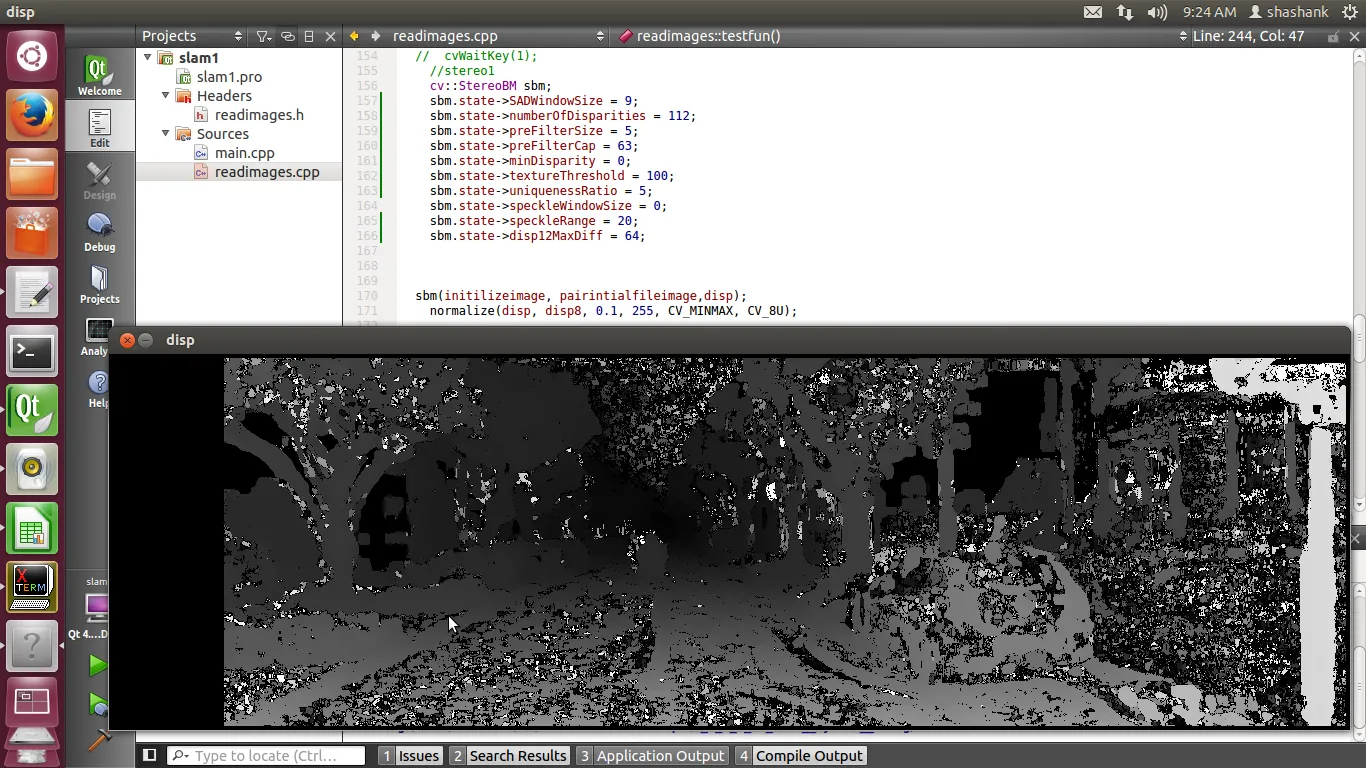
我正在处理KITTI数据集,取两张图像并找到视差以获取3D点云。我面临的问题是无法得到良好的视差图。大多数视差值小于0.1。视差值在0到1之间(我需要对它们进行缩放吗)?我的立体参数如下:
cv::StereoBM sbm;
sbm.state->SADWindowSize = 9;
sbm.state->numberOfDisparities = 112;
sbm.state->preFilterSize = 5;
sbm.state->preFilterCap = 1;
sbm.state->minDisparity = 0;
sbm.state->textureThreshold = 5;
sbm.state->uniquenessRatio = 5;
sbm.state->speckleWindowSize = 0;
sbm.state->speckleRange = 20;
sbm.state->disp12MaxDiff = 64;
sbm(leftimage, rightimage,disp);
normalize(disp, disp8, 0.1, 255, CV_MINMAX, CV_8U);