我正在使用
当调用
很不幸,
pcl实现的迭代最近点算法。我想能够使用任何配准方法中的内点点集进行操作。当调用
align函数时,registration类具有输出对齐点云的功能:icp_.align(outcloud, guess);
PCLBase类具有以下功能:
indices = icp_.getIndices();
很不幸,
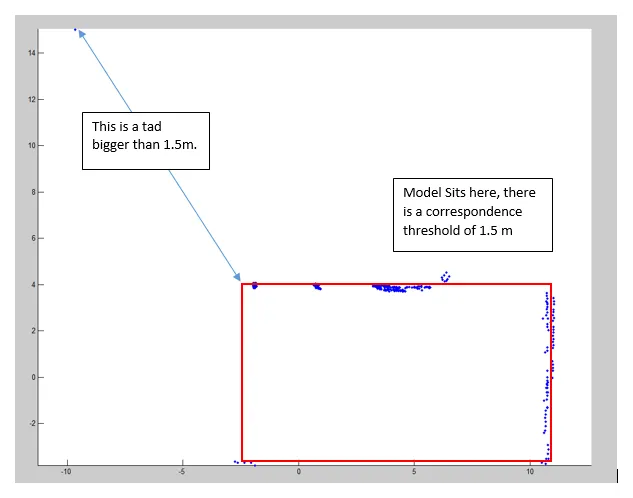
getIndices只返回整个点云的索引。我已经测试了一个点云,通过距离对应拒绝的异常值(或内点)似乎无法检索?
我检查过,有些点应该被拒绝,如下图所示: