我想从移动相机的两张图片中计算深度信息。使用
相对四元数是指:
也就是说,相对旋转矩阵是,
Sensor.TYPE_ROTATION_VECTOR,我拥有两张图片的四元数以及Img1到Img2的相对四元数。
Img1
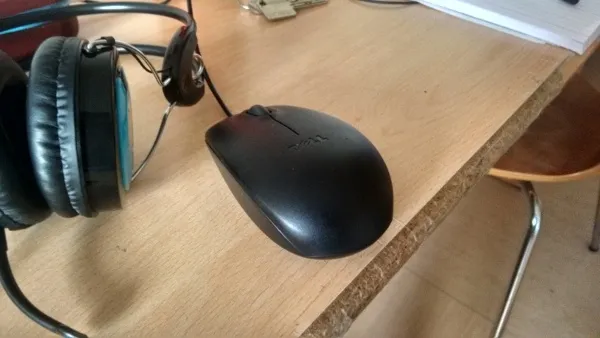
q1 = 0.7545 - 0.1137i - 0.2715j - 0.5865k
图片2
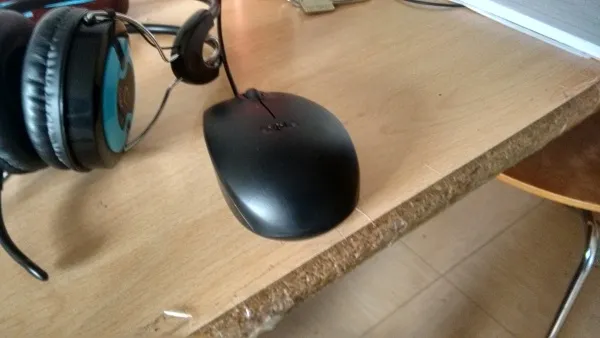
q2 = 0.7706 - 0.2252i - 0.3511j - 0.4817k
相对四元数是指:
qr = -0.9850 + 0.0072i + 0.1329j - 0.1097k
也就是说,相对旋转矩阵是,
|0.9406 -0.2142 -0.2635 |
|0.2180 0.9758 -0.0150 |
|0.2604 -0.0433 0.9645 |
getPerspectiveTransform给出的矩阵吗?
当我将这个3x3旋转矩阵用于warpPerspective中时,除了左上角有一些东西之外,我得到的几乎是一个空白图像。(也许是围绕图像旋转的轴错误了)
我做错了什么?
注意 : 两张图片之间还有一小段平移(对于糟糕的图片,我很抱歉)
编辑1 : 根据这个链接,对于我的Moto G第二代,我得到了一个内部相机矩阵,如下所示:
K = |-3570 0 1632 |
| 0 3554.39 1218.65|
| 0 0 1 |