我该如何将PyBullet中的对象位置转换为像素坐标,并使用PyBullet和OpenCV在帧上绘制一条线?
我们想要这样做是因为在DIRECT模式下,PyBullet本地的addUserDebugLine()函数不可用。
import pybullet as p
import numpy as np
import time
import pybullet_data
import cv2
VIDEO_RESOLUTION = (1280, 720)
MY_COLORS = [(255,0,0), (0,255,0), (0,0,255)]
def capture_frame(base_pos=[0,0,0], _cam_dist=3, _cam_yaw=45, _cam_pitch=-45):
_render_width, _render_height = VIDEO_RESOLUTION
view_matrix = p.computeViewMatrixFromYawPitchRoll(
cameraTargetPosition=base_pos,
distance=_cam_dist,
yaw=_cam_yaw,
pitch=_cam_pitch,
roll=0,
upAxisIndex=2)
proj_matrix = p.computeProjectionMatrixFOV(
fov=90, aspect=float(_render_width) / _render_height,
nearVal=0.01, farVal=100.0)
(_, _, px, _, _) = p.getCameraImage(
width=_render_width, height=_render_height, viewMatrix=view_matrix,
projectionMatrix=proj_matrix, renderer=p.ER_TINY_RENDERER) # ER_BULLET_HARDWARE_OPENGL)
rgb_array = np.array(px, dtype=np.uint8)
rgb_array = np.reshape(rgb_array, (_render_height, _render_width, 4))
rgb_array = rgb_array[:, :, :3]
return rgb_array, view_matrix, proj_matrix
def render():
frame, vmat, pmat = capture_frame()
p1, cubeOrn = p.getBasePositionAndOrientation(1)
p2, cubeOrn = p.getBasePositionAndOrientation(2)
frame, view_matrix, proj_matrix = capture_frame()
frame = cv2.resize(frame, VIDEO_RESOLUTION)
points = {}
# reshape matrices
my_order = 'C'
pmat = np.array(proj_matrix).reshape((4,4), order=my_order)
vmat = np.array(view_matrix).reshape((4,4), order=my_order)
fmat = vmat.T @ pmat.T
# compute origin from origin point in simulation
origin = np.array([0,0,0,1])
frame_origin = (fmat @ origin)[:3]*np.array([1280, 640, 0]) + np.array([640, 360, 0])
# define unit vectors
unit_vectors = [ np.array([1,0,0,1]),
np.array([0,1,0,1]),
np.array([0,0,1,1]) ]
for col_id, unit_vector in enumerate(unit_vectors):
cur_point = (fmat @ unit_vector)[:3]*np.array([1280, 640, 0]) + np.array([640, 360, 0])
cv2.line(frame, (640,360), (int(cur_point[0]),int(cur_point[1])), color=MY_COLORS[col_id], thickness=2)
cv2.imwrite("my_rendering.jpg", frame)
print(p1,p2)
if __name__ == '__main__':
physicsClient = p.connect(p.DIRECT)#or p.DIRECT for non-graphical version
p.setAdditionalSearchPath(pybullet_data.getDataPath()) #optionally
p.setGravity(0,0,-10)
planeId = p.loadURDF("plane.urdf")
startPos = [1,0,0.2]
startOrientation = p.getQuaternionFromEuler([0,0,0])
boxId = p.loadURDF("r2d2.urdf",startPos, startOrientation)
startPos = [0,2,0.2]
boxId = p.loadURDF("r2d2.urdf",startPos, startOrientation)
#set the center of mass frame (loadURDF sets base link frame) startPos/Ornp.resetBasePositionAndOrientation(boxId, startPos, startOrientation)
for i in range (2400):
if i == 2399:
render()
p.stepSimulation()
p.disconnect()
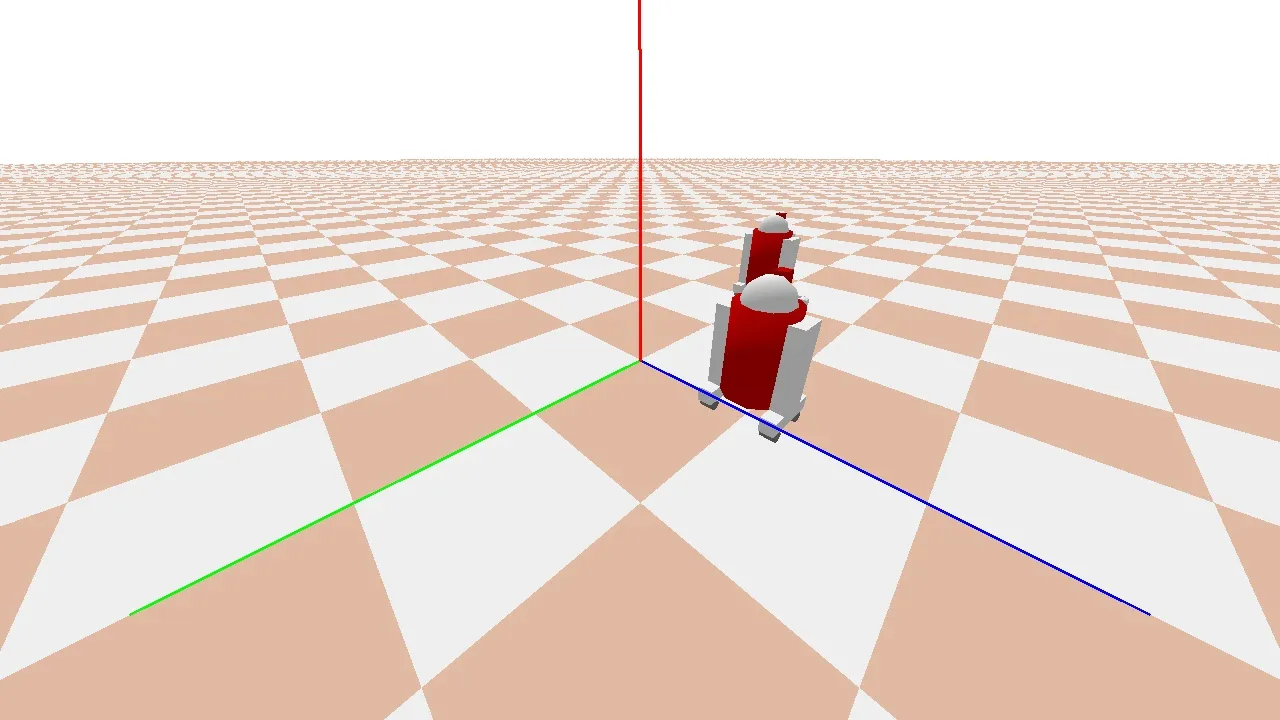
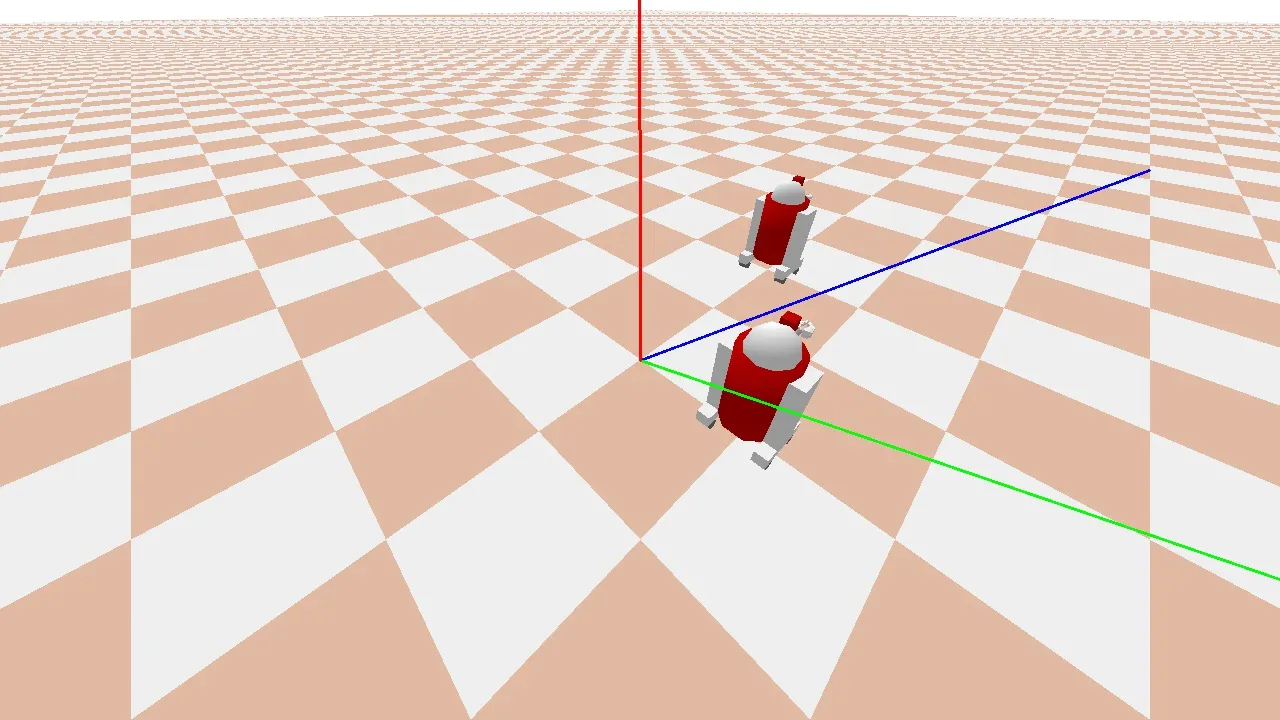
期望的输出应该是以下帧,但原点坐标框架正确绘制。例如,X、Y 和 Z 轴分别为红色、蓝色和绿色。
由于两个 R2D2 机器人分别位于 [1,0,0] 和 [0,1,0],我们可以看到坐标框架是错误的。(见下图)
 我们尝试了以下内容:
我们尝试了以下内容:- 转置矩阵 - 不转置矩阵 - 更改计算 fmat 的顺序,例如 pmat @ vmat 而不是 vmat @ pmat 等等。
任何帮助都将不胜感激。