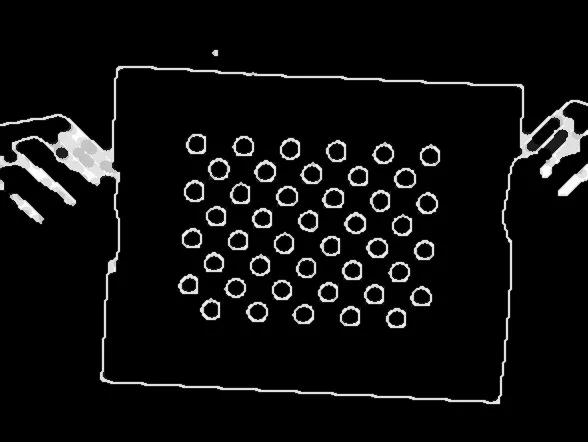
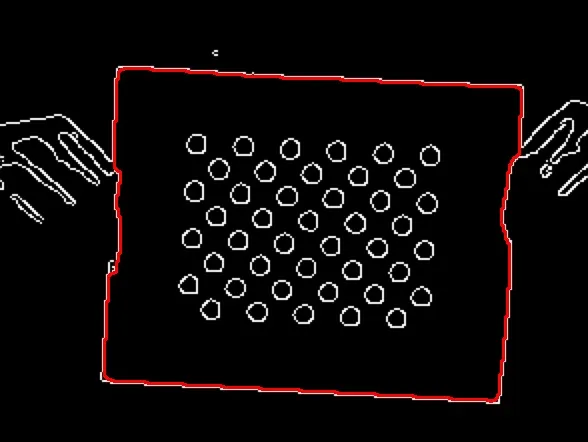
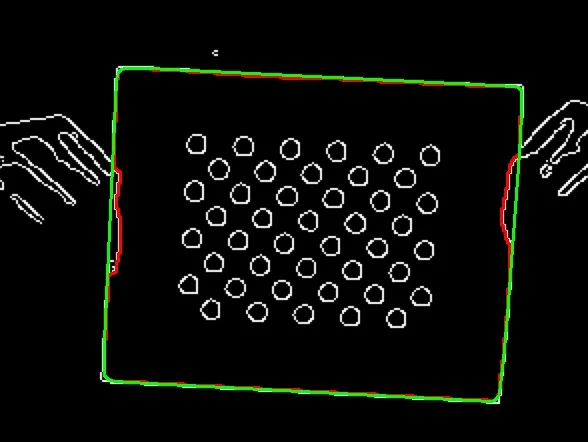
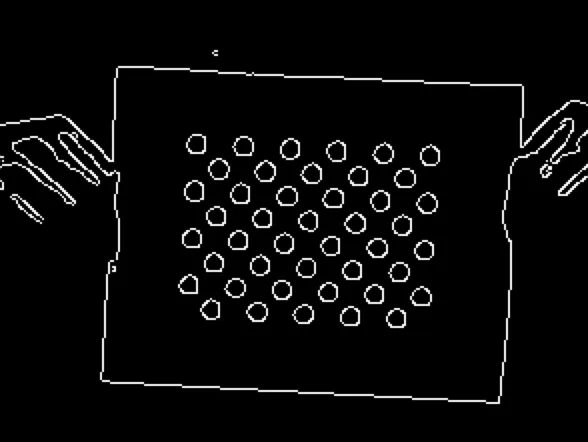
您可以应用形态学滤波器来关闭边缘图像中的间隙。然后,如果找到轮廓,您可以像下面显示的那样检测内部封闭轮廓。然后找到该轮廓的凸包以获取矩形。
封闭边缘:
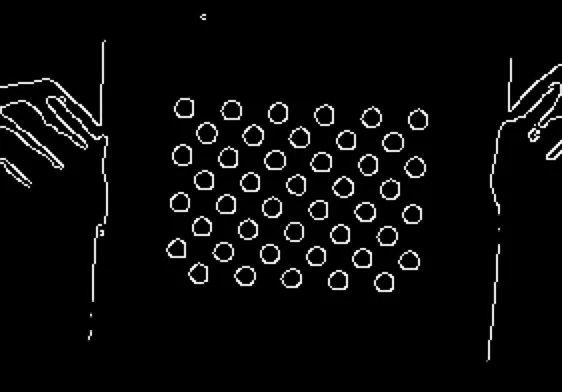
轮廓:
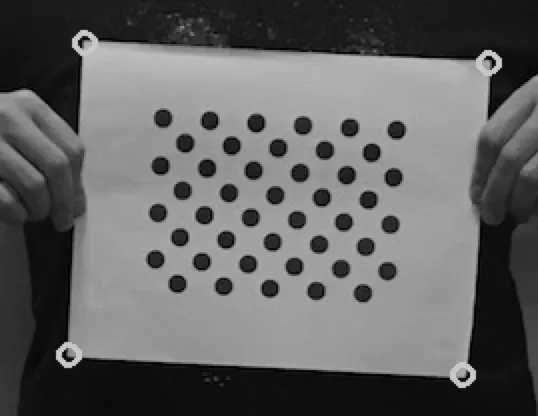
凸包:
在下面的代码中,我只是使用了一个任意的内核大小来进行形态学滤波,并使用面积比阈值过滤出感兴趣的轮廓。您可以使用自己的标准来替代这些内容。
代码:
Mat im = imread("Sh1Vp.png", 0);
Mat kernel = getStructuringElement(MORPH_ELLIPSE, Size(11, 11));
Mat morph;
morphologyEx(im, morph, CV_MOP_CLOSE, kernel);
int rectIdx = 0;
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(morph, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
for (size_t idx = 0; idx < contours.size(); idx++)
{
RotatedRect rect = minAreaRect(contours[idx]);
double areaRatio = abs(contourArea(contours[idx])) / (rect.size.width * rect.size.height);
if (areaRatio > .95)
{
rectIdx = idx;
break;
}
}
vector<Point> hull;
convexHull(contours[rectIdx], hull, false, true);
Mat rgb;
cvtColor(im, rgb, CV_GRAY2BGR);
drawContours(rgb, contours, rectIdx, Scalar(0, 0, 255), 2);
for(size_t i = 0; i < hull.size(); i++)
{
line(rgb, hull[i], hull[(i + 1)%hull.size()], Scalar(0, 255, 0), 2);
}
appoxPolyDP(),然后检查生成的approxCurve大小。如果是4,则表示您有一个四边形,那就是您的角落。之后,您可能需要重新排列角落的顺序,因为顺序不能保证。如果您需要更多帮助,请告诉我。 - MeetTitan