我会通过获取自适应阈值处理后轮廓的旋转边界框的角来采用不同的方法。以下是我的Python/OpenCV代码。
输入:

import cv2
import numpy as np
img = cv2.imread("rectangle.png")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = 255-gray
thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 17, 1)
thresh = 255-thresh
kernel = np.ones((3,3), np.uint8)
morph = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel)
morph = cv2.morphologyEx(morph, cv2.MORPH_CLOSE, kernel)
kernel = np.ones((7,3), np.uint8)
vert = cv2.morphologyEx(morph, cv2.MORPH_OPEN, kernel)
kernel = np.ones((3,7), np.uint8)
horiz = cv2.morphologyEx(morph, cv2.MORPH_OPEN, kernel)
rect = cv2.add(horiz,vert)
kernel = np.ones((3,3), np.uint8)
rect = cv2.morphologyEx(rect, cv2.MORPH_ERODE, kernel)
contours = cv2.findContours(rect, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contours = contours[0] if len(contours) == 2 else contours[1]
for c in contours:
area_thresh = 0
area = cv2.contourArea(c)
if area > area_thresh:
area = area_thresh
big_contour = c
rot_rect = cv2.minAreaRect(big_contour)
box = cv2.boxPoints(rot_rect)
box = np.int0(box)
print(box)
rot_bbox = img.copy()
cv2.drawContours(rot_bbox,[box],0,(0,0,255),2)
cv2.imwrite("rectangle_thresh.png", thresh)
cv2.imwrite("rectangle_outline.png", rect)
cv2.imwrite("rectangle_bounds.png", rot_bbox)
cv2.imshow("IMAGE", img)
cv2.imshow("THRESHOLD", thresh)
cv2.imshow("MORPH", morph)
cv2.imshow("VERT", vert)
cv2.imshow("HORIZ", horiz)
cv2.imshow("RECT", rect)
cv2.imshow("BBOX", rot_bbox)
cv2.waitKey(0)
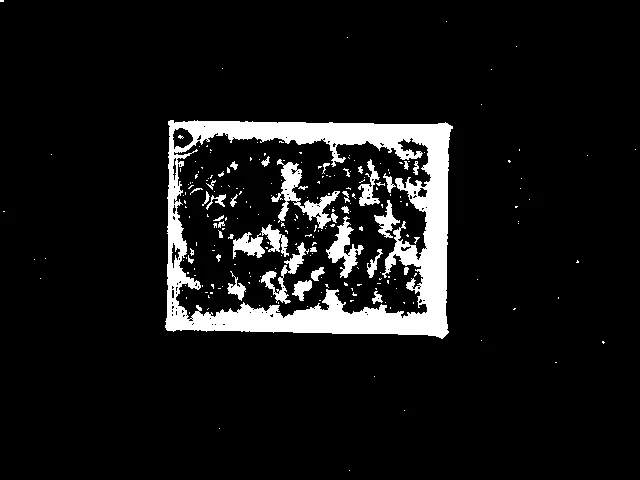
二值化图像:

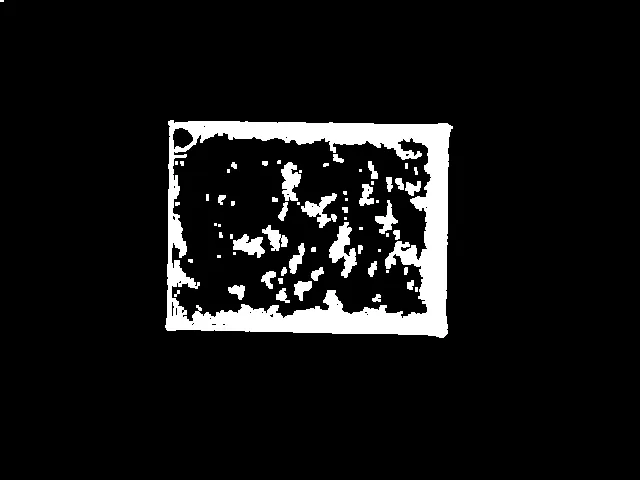
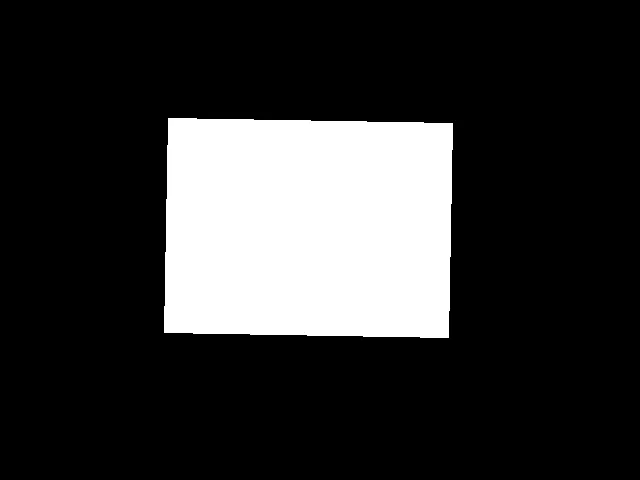
矩形区域提取:
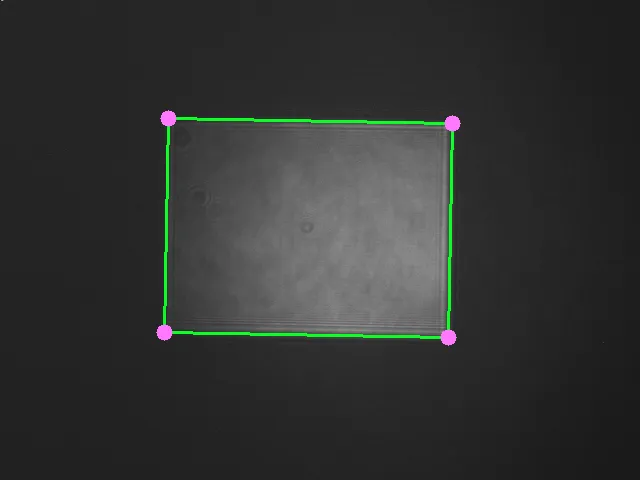
图像上的旋转包围框:
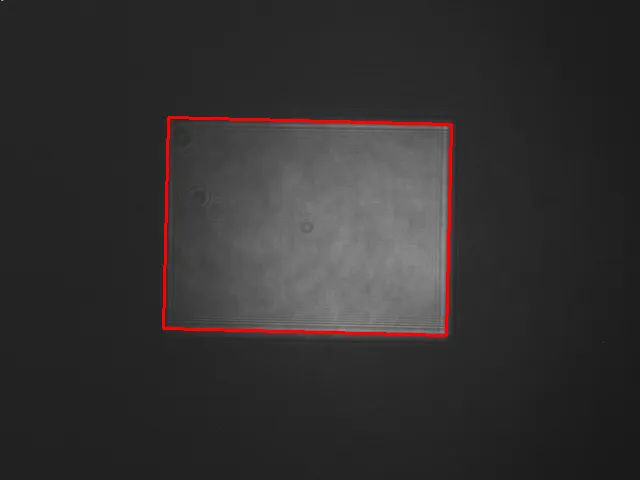
旋转包围框角点:
[[446 335]
[163 328]
[168 117]
[451 124]]
补充说明:
这里提供了一个较短的代码版本,可以通过在阈值化之前添加一些高斯模糊来实现。
import cv2
import numpy as np
img = cv2.imread("rectangle.png")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = 255-gray
blur = cv2.GaussianBlur(gray, (3,3), 0)
thresh = cv2.adaptiveThreshold(blur, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 75, 2)
thresh = 255-thresh
kernel = np.ones((5,5), np.uint8)
rect = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel)
rect = cv2.morphologyEx(rect, cv2.MORPH_CLOSE, kernel)
kernel = np.ones((5,5), np.uint8)
rect = cv2.morphologyEx(rect, cv2.MORPH_ERODE, kernel)
contours = cv2.findContours(rect, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contours = contours[0] if len(contours) == 2 else contours[1]
for c in contours:
area_thresh = 0
area = cv2.contourArea(c)
if area > area_thresh:
area = area_thresh
big_contour = c
rot_rect = cv2.minAreaRect(big_contour)
box = cv2.boxPoints(rot_rect)
box = np.int0(box)
for p in box:
pt = (p[0],p[1])
print(pt)
rot_bbox = img.copy()
cv2.drawContours(rot_bbox,[box],0,(0,0,255),2)
cv2.imwrite("rectangle_thresh.png", thresh)
cv2.imwrite("rectangle_outline.png", rect)
cv2.imwrite("rectangle_bounds.png", rot_bbox)
cv2.imshow("IMAGE", img)
cv2.imshow("THRESHOLD", thresh)
cv2.imshow("RECT", rect)
cv2.imshow("BBOX", rot_bbox)
cv2.waitKey(0)
二值化图像:
矩形区域提取:

图像上的旋转边界框:
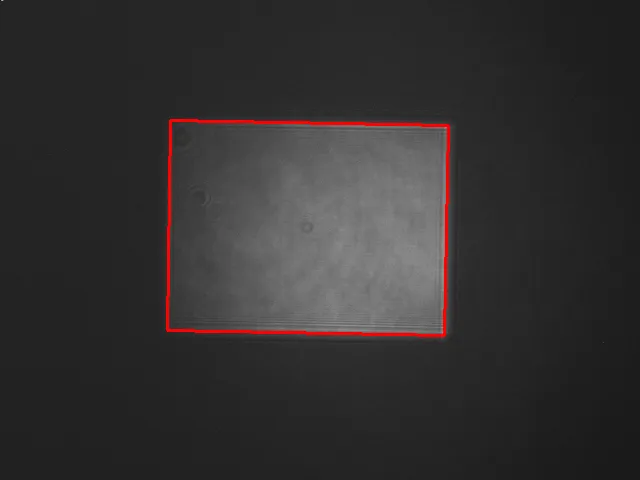
旋转边界框角点:
(444, 335)
(167, 330)
(170, 120)
(448, 125)
 。
。