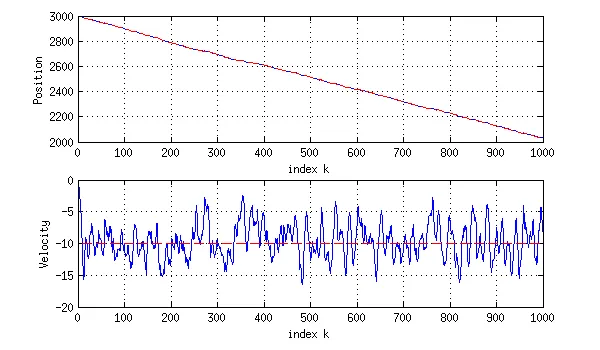
抱歉这么麻烦,但我根据数十篇文章多次检查了我的代码,但我的KF仍然无法正常工作。所谓“不正常工作”,是指KF的估计值错误。这里是Real、Noised和KF估计位置的一个漂亮的剪贴板(只有一小部分)paste 。
我的示例与我找到的每个教程都相同-我有一个位置和速度的状态向量。位置以米为单位,表示空中垂直位置。我现实世界的案例是跳伞(带降落伞)。在我生成的样本数据中,我假设我们从3000m开始,速度为10m/s。
附言:我非常确定矩阵计算是正确的-逻辑上肯定有错误。
这里是我生成的数据:
我的示例与我找到的每个教程都相同-我有一个位置和速度的状态向量。位置以米为单位,表示空中垂直位置。我现实世界的案例是跳伞(带降落伞)。在我生成的样本数据中,我假设我们从3000m开始,速度为10m/s。
附言:我非常确定矩阵计算是正确的-逻辑上肯定有错误。
这里是我生成的数据:
void generateData(float** inData, float** noisedData, int x, int y){
inData[0][0]= 3000; //start position
inData[1][0]= -10; // 10m/s velocity; minus because we assume it's falling
noisedData[0][0]= 2998;
noisedData[1][0]= -10;
for(int i=1; i<x; i++){
inData[0][i]= inData[0][i-1] + inData[1][i-1];
inData[1][i]= inData[1][i-1]; //the velocity doesn't change for simplicity's sake
noisedData[0][i]=inData[0][i]+(rand()%6-3); //we add noise to real measurement
noisedData[1][i]=inData[1][i]; //velocity has no noise
}
}
这是我的实现(矩阵初始化基于维基百科卡尔曼示例):
int main(int argc, char** argv) {
srand(time(NULL));
float** inData = createMatrix(100,2); //2 rows, 100 columns
float** noisedData = createMatrix(100,2);
float** estData = createMatrix(100,2);
generateData(inData, noisedData, 100, 2);
float sampleRate=0.1; //10hz
float** A=createMatrix(2,2);
A[0][0]=1;
A[0][1]=sampleRate;
A[1][0]=0;
A[1][1]=1;
float** B=createMatrix(1,2);
B[0][0]=pow(sampleRate,2)/2;
B[1][0]=sampleRate;
float** C=createMatrix(2,1);
C[0][0]=1; //we measure only position
C[0][1]=0;
float u=1.0; //acceleration magnitude
float accel_noise=0.2; //acceleration noise
float measure_noise=1.5; //1.5 m standard deviation
float R=pow(measure_noise,2); //measure covariance
float** Q=createMatrix(2,2); //process covariance
Q[0][0]=pow(accel_noise,2)*(pow(sampleRate,4)/4);
Q[0][1]=pow(accel_noise,2)*(pow(sampleRate,3)/2);
Q[1][0]=pow(accel_noise,2)*(pow(sampleRate,3)/2);
Q[1][1]=pow(accel_noise,2)*pow(sampleRate,2);
float** P=createMatrix(2,2); //covariance update
P[0][0]=0;
P[0][1]=0;
P[1][0]=0;
P[1][1]=0;
float** P_est=createMatrix(2,2);
P_est[0][0]=P[0][0];
P_est[0][1]=P[0][1];
P_est[1][0]=P[1][0];
P_est[1][1]=P[1][1];
float** K=createMatrix(1,2); //Kalman gain
float** X_est=createMatrix(1,2); //our estimated state
X_est[0][0]=3000; X_est[1][0]=10;
// !! KALMAN ALGORITHM START !! //
for(int i=0; i<100; i++)
{
float** temp;
float** temp2;
float** temp3;
float** C_trans=matrixTranspose(C,2,1);
temp=matrixMultiply(P_est,C_trans,2,2,1,2); //2x1
temp2=matrixMultiply(C,P_est,2,1,2,2); //1x2
temp3=matrixMultiply(temp2,C_trans,2,1,1,2); //1x1
temp3[0][0]+=R;
K[0][0]=temp[0][0]/temp3[0][0]; // 1. KALMAN GAIN
K[1][0]=temp[1][0]/temp3[0][0];
temp=matrixMultiply(C,X_est,2,1,1,2);
float diff=noisedData[0][i]-temp[0][0]; //diff between meas and est
X_est[0][0]=X_est[0][0]+(K[0][0]*diff); // 2. ESTIMATION CORRECTION
X_est[1][0]=X_est[1][0]+(K[1][0]*diff);
temp=createMatrix(2,2);
temp[0][0]=1; temp[0][1]=0; temp[1][0]=0; temp[1][1]=1;
temp2=matrixMultiply(K,C,1,2,2,1);
temp3=matrixSub(temp,temp2,2,2,2,2);
P=matrixMultiply(temp3,P_est,2,2,2,2); // 3. COVARIANCE UPDATE
temp=matrixMultiply(A,X_est,2,2,1,2);
X_est[0][0]=temp[0][0]+B[0][0]*u;
X_est[1][0]=temp[1][0]+B[1][0]*u; // 4. PREDICT NEXT STATE
temp=matrixMultiply(A,P,2,2,2,2);
float** A_inv=getInverse(A,2);
temp2=matrixMultiply(temp,A_inv,2,2,2,2);
P_est=matrixAdd(temp2,Q,2,2,2,2); // 5. PREDICT NEXT COVARIANCE
estData[0][i]=X_est[0][0]; //just saving here for later to write out
estData[1][i]=X_est[1][0];
}
for(int i=0; i<100; i++) printf("%4.2f : %4.2f : %4.2f \n", inData[0][i], noisedData[0][i], estData[0][i]); // just writing out
return (EXIT_SUCCESS);
}
-m/s是正确的吗?我明白你在描述物体下落,但是这些方程式是否意识到了这一点呢?保持正数并在需要时进行减法运算是否更好呢?很好奇! - ChiefTwoPencils