使用sklearn库中的SVM算法,我想绘制数据,并使每个标签用不同的颜色表示。我不想给点着色,而是要填充区域颜色。
现在我的代码如下:
d_pred, d_train_std, d_test_std, l_train, l_test
d_pred是预测标签。 我将绘制d_pred和d_train_std的图形,其形状为:(70000,2),其中X轴是第一列,Y轴是第二列。
谢谢。
使用sklearn库中的SVM算法,我想绘制数据,并使每个标签用不同的颜色表示。我不想给点着色,而是要填充区域颜色。
现在我的代码如下:
d_pred, d_train_std, d_test_std, l_train, l_test
d_pred是预测标签。 我将绘制d_pred和d_train_std的图形,其形状为:(70000,2),其中X轴是第一列,Y轴是第二列。
谢谢。
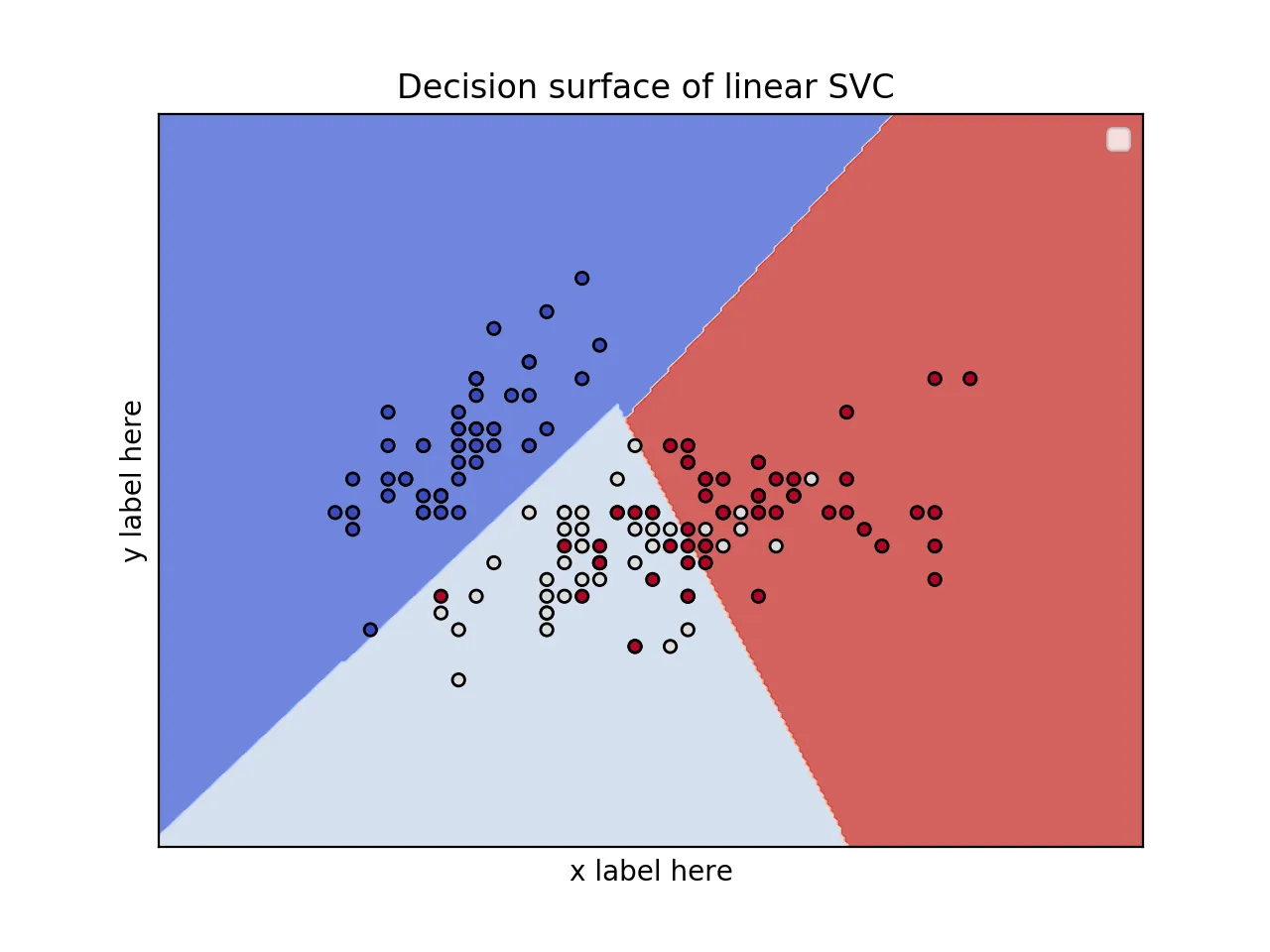
当特征太多时,无法可视化决策面,因为维度太多了,没有办法可视化N维曲面。
然而,你可以使用2个特征并按如下方式绘制出漂亮的决策面。
from sklearn.svm import SVC
import numpy as np
import matplotlib.pyplot as plt
from sklearn import svm, datasets
iris = datasets.load_iris()
X = iris.data[:, :2] # we only take the first two features.
y = iris.target
def make_meshgrid(x, y, h=.02):
x_min, x_max = x.min() - 1, x.max() + 1
y_min, y_max = y.min() - 1, y.max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h), np.arange(y_min, y_max, h))
return xx, yy
def plot_contours(ax, clf, xx, yy, **params):
Z = clf.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
out = ax.contourf(xx, yy, Z, **params)
return out
model = svm.SVC(kernel='linear')
clf = model.fit(X, y)
fig, ax = plt.subplots()
# title for the plots
title = ('Decision surface of linear SVC ')
# Set-up grid for plotting.
X0, X1 = X[:, 0], X[:, 1]
xx, yy = make_meshgrid(X0, X1)
plot_contours(ax, clf, xx, yy, cmap=plt.cm.coolwarm, alpha=0.8)
ax.scatter(X0, X1, c=y, cmap=plt.cm.coolwarm, s=20, edgecolors='k')
ax.set_ylabel('y label here')
ax.set_xlabel('x label here')
ax.set_xticks(())
ax.set_yticks(())
ax.set_title(title)
ax.legend()
plt.show()
from sklearn.svm import SVC
import numpy as np
import matplotlib.pyplot as plt
from sklearn import svm, datasets
from mpl_toolkits.mplot3d import Axes3D
iris = datasets.load_iris()
X = iris.data[:, :3] # we only take the first three features.
Y = iris.target
#make it binary classification problem
X = X[np.logical_or(Y==0,Y==1)]
Y = Y[np.logical_or(Y==0,Y==1)]
model = svm.SVC(kernel='linear')
clf = model.fit(X, Y)
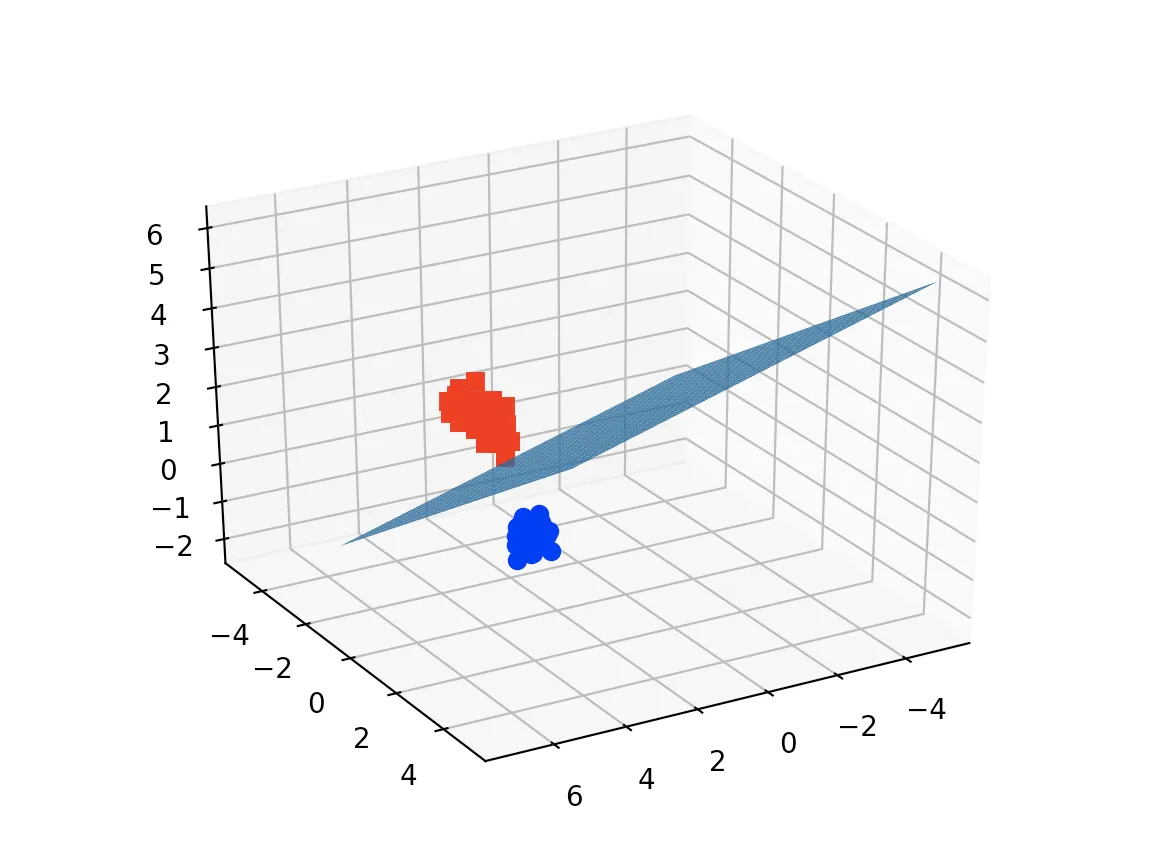
# The equation of the separating plane is given by all x so that np.dot(svc.coef_[0], x) + b = 0.
# Solve for w3 (z)
z = lambda x,y: (-clf.intercept_[0]-clf.coef_[0][0]*x -clf.coef_[0][1]*y) / clf.coef_[0][2]
tmp = np.linspace(-5,5,30)
x,y = np.meshgrid(tmp,tmp)
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.plot3D(X[Y==0,0], X[Y==0,1], X[Y==0,2],'ob')
ax.plot3D(X[Y==1,0], X[Y==1,1], X[Y==1,2],'sr')
ax.plot_surface(x, y, z(x,y))
ax.view_init(30, 60)
plt.show()
outputs = my_clf.predict(1_test)
hits = []
for i in range(outputs.size):
if outputs[i] == 1:
hits.append(i) # save the index where it's 1
这将保存函数中所有命中点的索引(保存在“hits”列表中)。您可能可以在不使用循环的情况下完成此操作,但我发现这对我来说最容易。
然后要仅显示这些点,您可以编写类似以下内容的代码:
ax.scatter(1_test[hits[:], 0], 1_test[hits[:], 1], 1_test[hits[:], 2], c="cyan", s=2, edgecolor=None)
在三维中得到函数可能会很困难。获取可视化的简便方法是获取覆盖您点空间的大量点,并通过您学习的函数(my_model.predict)运行它们,保留击中函数内部的点并对其进行可视化。添加的点越多,边界就越清晰。
d_train_std是什么? - seralouk