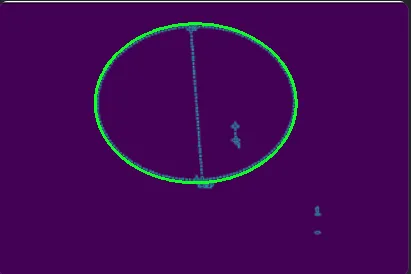
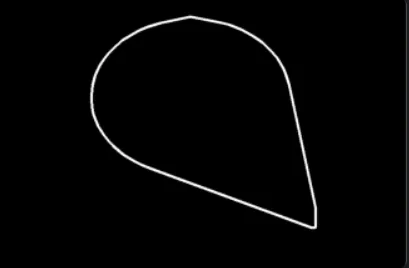
我想要提取构成椭圆的点,然后画出椭圆。但由于一些可以被认为是离群值的点,我得到了一个无效的椭圆掩码,就像这样:
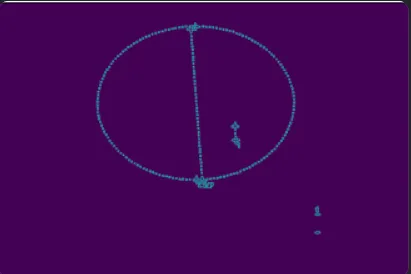
这是我正在执行的代码,但它总是选择异常值
`cv2.rectangle(cleanedpartiallyimage, (0, 0), (1200, 10), (0, 0, 0), -1)
cv2.rectangle(cleanedpartiallyimage, (0, 0), (47, 1200), (0, 0, 0), -1)
image = cv2.cvtColor(cleanedpartiallyimage, cv2.COLOR_BGR2HSV) lower = np.array([85, 0, 20], dtype="uint8")
upper = np.array([95, 255, 255], dtype="uint8") mygray = cv2.inRange(image, lower, upper)
#--- Gaussian and Canny filters to make it easy to get the contours
blurred = cv2.GaussianBlur(mygray, (5, 5), 0) imageCanny = cv2.Canny(blurred, 0, 100, 0)
ret,th = cv2.threshold(imageCanny,127,255, 0)
#--- Find all the contours in the binary image ---
contours,hierarchy = cv2.findContours(th,3,1)
cnt = contours big_contour = [] max = 0 for i in cnt:
area = cv2.contourArea(i) #--- find the contour having biggest area ---
if(area > max): max = area big_contour = i
final = cv2.drawContours(imageCanny, big_contour, -1, (0,255,0), 3)
actualcontours, hierarchy = cv2.findContours(final, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
#---Removing side contour points
actualcontours = getactualcontours(actualcontours, 60)
empty = np.zeros((image.shape[0], image.shape[1], 3), np.uint8)
#---Removes linear contour points
ConvexHullPoints = contoursConvexHull(actualcontours)
#---Converts the points to Ellipse using fitEllipse
test41 = cv2.polylines(empty, [ConvexHullPoints], True, (255, 255, 255), 3)
imageCannyee = cv2.Canny(test41, 0, 100, 0)
contours, hierarchy = cv2.findContours(imageCannyee, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
for cont in contours:
if len(cont) < 20:
break
elps = cv2.fitEllipse(cont)
anotherempty = np.zeros((image.shape[0], image.shape[1], 3), np.uint8)
#---Drawing the ellipse into the empty mask
cv2.ellipse(anotherempty, elps, (255, 255, 255), 2) plt.imshow(anotherempty)