我已经使用cv::StereoBM一段时间了,现在想尝试切换到cuda::StereoBM(使用GPU),但是我遇到了一个问题,即使使用相同的设置和输入图像,它们看起来完全不同。我在这篇文章中读到,与cv::StereoBM相比,cuda的输入需要以不同的方式进行矫正。具体来说,视差必须在[0,256]范围内。我花了很长时间寻找其他关于如何为cuda校正图像的示例,但没有结果。使用cv::StereoBM的输出效果不错,因此我的图像对于它来说已经被正确矫正了。有没有办法将一种矫正类型转换为另一种呢?
如果有人感兴趣,这里是我用于立体纠正的代码(注意:我对每个图像进行了矫正,以消除“镜头效应”,然后再将它们运行到这个程序中):
如果有人感兴趣,这里是我用于立体纠正的代码(注意:我对每个图像进行了矫正,以消除“镜头效应”,然后再将它们运行到这个程序中):
#include "opencv2/core/core.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
//#include "opencv2/contrib/contrib.hpp"
#include <stdio.h>
using namespace cv;
using namespace std;
int main(int argc, char* argv[])
{
int numBoards = 20;
int board_w = 9;
int board_h = 14;
Size board_sz = Size(board_w, board_h);
int board_n = board_w*board_h;
vector<vector<Point3f> > object_points;
vector<vector<Point2f> > imagePoints1, imagePoints2;
vector<Point2f> corners1, corners2;
vector<Point3f> obj;
for (int j=0; j<board_n; j++)
{
obj.push_back(Point3f(j/board_w, j%board_w, 0.0f));
}
Mat img1, img2, gray1, gray2, image1, image2;
const char* right_cam_gst = "nvcamerasrc sensor-id=0 ! video/x-raw(memory:NVMM), format=UYVY, width=1280, height=720, framerate=30/1 ! nvvidconv flip-method=2 ! video/x-raw, format=GRAY8, width=1280, height=720 ! appsink";
const char* Left_cam_gst = "nvcamerasrc sensor-id=1 ! video/x-raw(memory:NVMM), format=UYVY, width=1280, height=720, framerate=30/1 ! nvvidconv flip-method=2 ! video/x-raw, format=GRAY8, width=1280, height=720 ! appsink";
VideoCapture cap1 = VideoCapture(right_cam_gst);
VideoCapture cap2 = VideoCapture(Left_cam_gst);
int success = 0, k = 0;
bool found1 = false, found2 = false;
Mat distCoeffs0;
Mat intrinsic0;
cv::FileStorage storage0("CamData0.yml", cv::FileStorage::READ);
storage0["distCoeffs"] >> distCoeffs0;
storage0["intrinsic"] >> intrinsic0;
storage0.release();
Mat distCoeffs1;
Mat intrinsic1;
cv::FileStorage storage1("CamData1.yml", cv::FileStorage::READ);
storage1["distCoeffs"] >> distCoeffs1;
storage1["intrinsic"] >> intrinsic1;
storage1.release();
while (success < numBoards)
{
cap1 >> image1;
cap2 >> image2;
//resize(img1, img1, Size(320, 280));
//resize(img2, img2, Size(320, 280));
undistort(image1, img1, intrinsic0, distCoeffs0);
undistort(image2, img2, intrinsic1, distCoeffs1);
// cvtColor(img1, gray1, CV_BGR2GRAY);
// cvtColor(img2, gray2, CV_BGR2GRAY);
found1 = findChessboardCorners(img1, board_sz, corners1, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
found2 = findChessboardCorners(img2, board_sz, corners2, CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
if (found1)
{
cornerSubPix(img1, corners1, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.1));
drawChessboardCorners(img1, board_sz, corners1, found1);
}
if (found2)
{
cornerSubPix(img2, corners2, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.1));
drawChessboardCorners(img2, board_sz, corners2, found2);
}
imshow("image1", img1);
imshow("image2", img2);
k = waitKey(10);
// if (found1 && found2)
// {
// k = waitKey(0);
// }
if (k == 27)
{
break;
}
if (k == ' ' && found1 !=0 && found2 != 0)
{
imagePoints1.push_back(corners1);
imagePoints2.push_back(corners2);
object_points.push_back(obj);
printf ("Corners stored\n");
success++;
if (success >= numBoards)
{
break;
}
}
}
destroyAllWindows();
printf("Starting Calibration\n");
Mat CM1 = Mat(3, 3, CV_64FC1);
Mat CM2 = Mat(3, 3, CV_64FC1);
Mat D1, D2;
Mat R, T, E, F;
stereoCalibrate(object_points, imagePoints1, imagePoints2,
CM1, D1, CM2, D2, img1.size(), R, T, E, F,
CV_CALIB_SAME_FOCAL_LENGTH | CV_CALIB_ZERO_TANGENT_DIST,
cvTermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, 1e-5));
FileStorage fs1("mystereocalib.yml", FileStorage::WRITE);
fs1 << "CM1" << CM1;
fs1 << "CM2" << CM2;
fs1 << "D1" << D1;
fs1 << "D2" << D2;
fs1 << "R" << R;
fs1 << "T" << T;
fs1 << "E" << E;
fs1 << "F" << F;
printf("Done Calibration\n");
printf("Starting Rectification\n");
Mat R1, R2, P1, P2, Q;
stereoRectify(CM1, D1, CM2, D2, img1.size(), R, T, R1, R2, P1, P2, Q);
fs1 << "R1" << R1;
fs1 << "R2" << R2;
fs1 << "P1" << P1;
fs1 << "P2" << P2;
fs1 << "Q" << Q;
fs1.release();
printf("Done Rectification\n");
printf("Applying Undistort\n");
Mat map1x, map1y, map2x, map2y;
Mat imgU1, imgU2, disp, disp8 , o1, o2;
initUndistortRectifyMap(CM1, Mat(), R1, P1, img1.size(), CV_32FC1, map1x, map1y);
initUndistortRectifyMap(CM2, Mat(), R2, P2, img2.size(), CV_32FC1, map2x, map2y);
printf("Undistort complete\n");
while(1)
{
cap1 >> image1;
cap2 >> image2;
undistort(image1, img1, intrinsic0, distCoeffs0);
undistort(image2, img2, intrinsic1, distCoeffs1);
remap(img1, imgU1, map1x, map1y, INTER_LINEAR, BORDER_CONSTANT, Scalar());
remap(img2, imgU2, map2x, map2y, INTER_LINEAR, BORDER_CONSTANT, Scalar());
imshow("image1", imgU1);
imshow("image2", imgU2);
k = waitKey(5);
if(k==27)
{
break;
}
}
cap1.release();
cap2.release();
return(0);
}
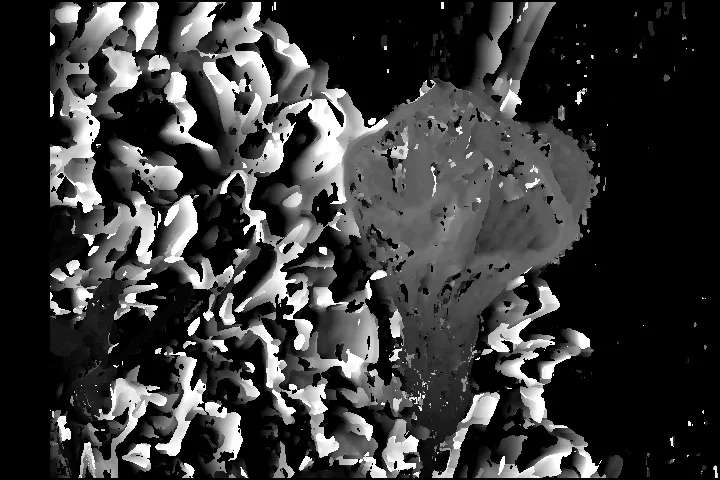
以下是不同方法输出的图像:
StereoBM(使用CPU)

cuda::StereoBM(使用GPU)