我目前正在使用OpenCV实现立体视觉。现在我正在使用Stereo_Calib示例来消除畸变并矫正图像。消除畸变效果很好。
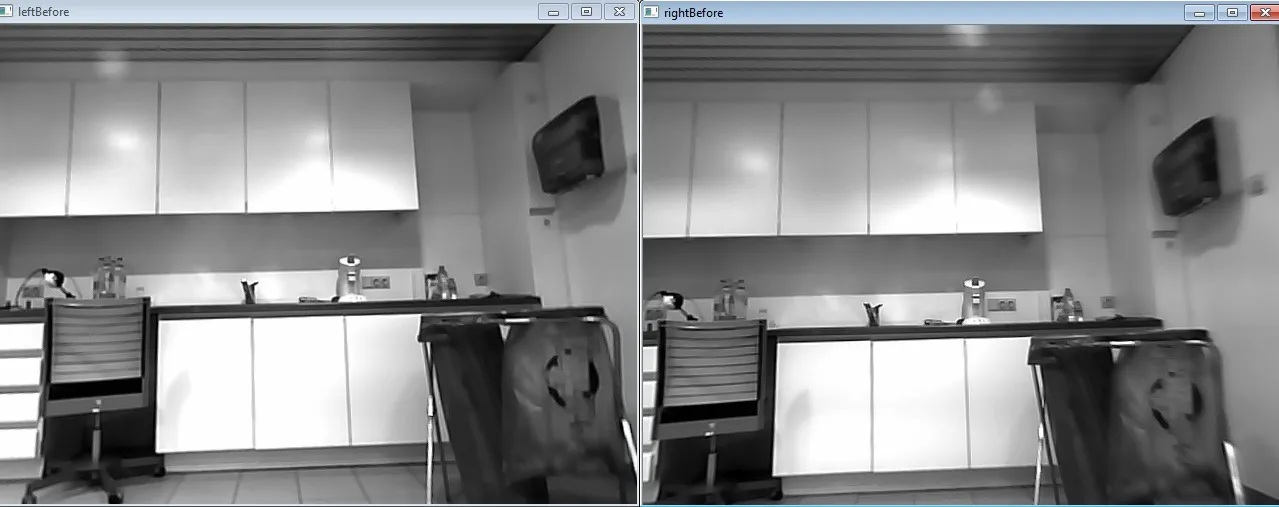
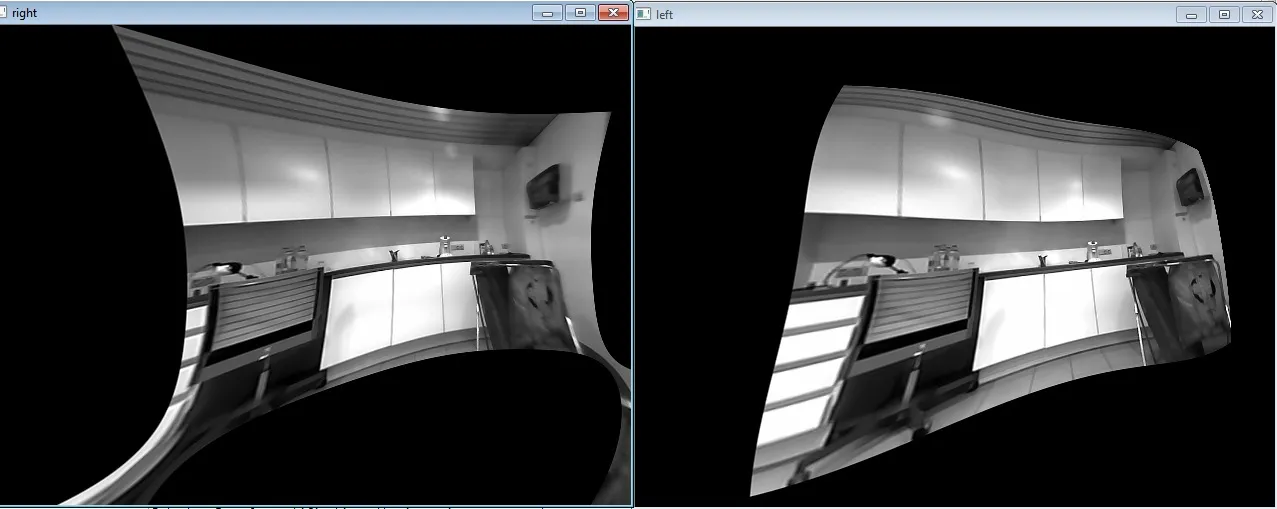
但是当我应用校正时,图像会非常扭曲。
void StereoCalibration::StereoRectify(Mat &imageLeft, Mat &imageRight)
{
Mat imLeft, imRight;
remap(imageLeft, imLeft,DistLeft.rmap[0], DistLeft.rmap[1], CV_INTER_CUBIC);
remap(imageRight,imRight, DistRight.rmap[0], DistRight.rmap[1], CV_INTER_CUBIC);
imageLeft = imLeft;
imageRight = imRight;
}