我正在尝试将一个ARAnchor投影到2D空间,但我面临着方向问题...
以下是我的函数,用于将左上角、右上角、左下角、右下角位置投影到2D空间:
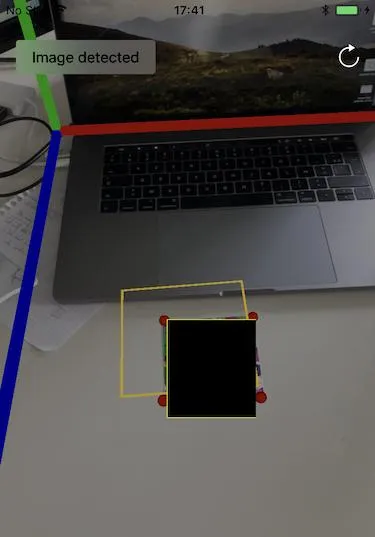
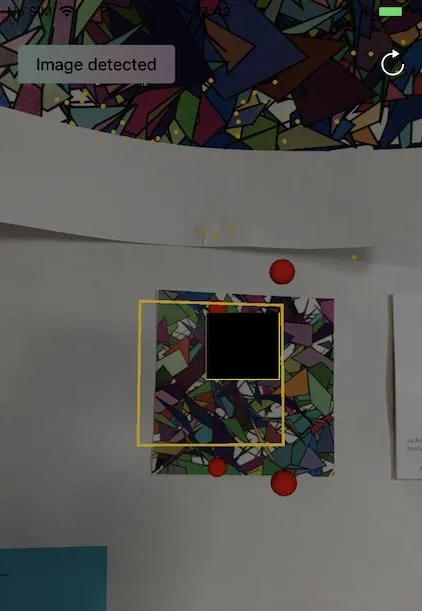
这个函数在我面对世界原点时运作得非常好。然而,如果我向左或向右移动,角点的计算就会出现问题。
以下是我的函数,用于将左上角、右上角、左下角、右下角位置投影到2D空间:
/// Returns the projection of an `ARImageAnchor` from the 3D world space
/// detected by ARKit into the 2D space of a view rendering the scene.
///
/// - Parameter from: An Anchor instance for projecting.
/// - Returns: An optional `CGRect` corresponding on `ARImageAnchor` projection.
internal func projection(from anchor: ARImageAnchor,
alignment: ARPlaneAnchor.Alignment,
debug: Bool = false) -> CGRect? {
guard let camera = session.currentFrame?.camera else {
return nil
}
let refImg = anchor.referenceImage
let anchor3DPoint = anchor.transform.columns.3
let size = view.bounds.size
let width = Float(refImg.physicalSize.width / 2)
let height = Float(refImg.physicalSize.height / 2)
/// Upper left corner point
let projection = ProjectionHelper.projection(from: anchor3DPoint,
width: width,
height: height,
focusAlignment: alignment)
let topLeft = projection.0
let topLeftProjected = camera.projectPoint(topLeft,
orientation: .portrait,
viewportSize: size)
let topRight:simd_float3 = projection.1
let topRightProjected = camera.projectPoint(topRight,
orientation: .portrait,
viewportSize: size)
let bottomLeft = projection.2
let bottomLeftProjected = camera.projectPoint(bottomLeft,
orientation: .portrait,
viewportSize: size)
let bottomRight = projection.3
let bottomRightProjected = camera.projectPoint(bottomRight,
orientation: .portrait,
viewportSize: size)
let result = CGRect(origin: topLeftProjected,
size: CGSize(width: topRightProjected.distance(point: topLeftProjected),
height: bottomRightProjected.distance(point: bottomLeftProjected)))
return result
}
这个函数在我面对世界原点时运作得非常好。然而,如果我向左或向右移动,角点的计算就会出现问题。