那应该可以工作。它对图像进行了4次扫描(您可能可以减少扫描次数,但逻辑会更复杂)。
在每次扫描中,它跟踪水平线、垂直线、向下对角线和向上对角线。
线条存储在vector<Vec4i>中,其中每个Vec4i都是一条带有Xstart,Ystart,Xend,Yend的线条;
如果这对您有用,请告诉我。
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
Mat1b img = imread("path_to_image", IMREAD_GRAYSCALE);
Mat1b w;
copyMakeBorder(img, w, 1, 1, 1, 1, BORDER_CONSTANT, Scalar(0));
vector<Vec4i> lines;
Vec4i line;
for (int y = 1; y < w.rows - 1; ++y)
{
for (int x = 1; x < w.cols - 1; ++x)
{
if (w(y, x) == 255)
{
int yy = y;
int xx = x;
line[0] = xx - 1;
line[1] = yy - 1;
while (true)
{
if (w(yy, xx + 1))
{
w(yy, xx) = 1;
++xx;
}
else
{
line[2] = xx - 1;
line[3] = yy - 1;
if (line[2] - line[0] > 0)
{
lines.push_back(line);
}
break;
}
}
}
}
}
for (int y = 1; y < w.rows - 1; ++y)
{
for (int x = 1; x < w.cols - 1; ++x)
{
if (w(y, x) == 255)
{
int yy = y;
int xx = x;
line[0] = xx - 1;
line[1] = yy - 1;
while (true)
{
if (w(yy + 1, xx))
{
w(yy, xx) = 1;
++yy;
}
else
{
line[2] = xx - 1;
line[3] = yy - 1;
if (line[3] - line[1] > 0)
{
lines.push_back(line);
}
break;
}
}
}
}
}
for (int y = 1; y < w.rows - 1; ++y)
{
for (int x = 1; x < w.cols - 1; ++x)
{
if (w(y, x) == 255)
{
int yy = y;
int xx = x;
line[0] = xx - 1;
line[1] = yy - 1;
while (true)
{
if (w(yy + 1, xx + 1))
{
w(yy, xx) = 1;
++xx;
++yy;
}
else
{
line[2] = xx - 1;
line[3] = yy - 1;
if (line[2] - line[0] > 0)
{
lines.push_back(line);
}
break;
}
}
}
}
}
for (int y = 1; y < w.rows - 1; ++y)
{
for (int x = 1; x < w.cols - 1; ++x)
{
if (w(y, x) == 255)
{
int yy = y;
int xx = x;
line[0] = xx - 1;
line[1] = yy - 1;
while (true)
{
if (w(yy - 1, xx + 1))
{
w(yy, xx) = 1;
++xx;
--yy;
}
else
{
line[2] = xx - 1;
line[3] = yy - 1;
if (line[2] - line[0] > 0)
{
lines.push_back(line);
}
break;
}
}
}
}
}
RNG rng(12345);
Mat3b res;
cvtColor(img, res, COLOR_GRAY2BGR);
for (int i = 0; i < lines.size(); ++i)
{
const Vec4i& lin = lines[i];
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
cv::line(res, Point(lin[0], lin[1]), Point(lin[2], lin[3]), color);
}
imshow("res", res);
waitKey();
return 0;
}
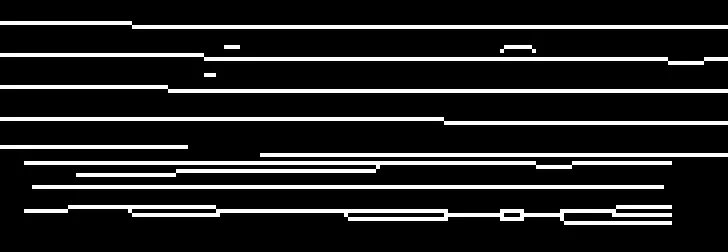
从这张图片开始:

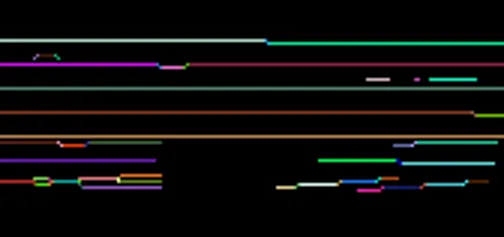
用随机颜色绘制每条检测到的线(从起点到终点)如下:

缩放: