我正在开发一个应用程序,使用SIFT + RANSAC和Homography来查找对象(OpenCV C ++,Java)。 我面临的问题是,在存在许多离群值时,RANSAC的性能很差。
因此,出于这个原因,我想尝试一下SIFT作者所说的投票方法,据说效果不错。
我已经阅读了我们应该在4维特征空间中投票的内容,其中4个维度为:
- 位置[x,y](有人称为平移) - 缩放 - 方向
而使用opencv可以轻松获得匹配的比例和方向:
因此,出于这个原因,我想尝试一下SIFT作者所说的投票方法,据说效果不错。
我已经阅读了我们应该在4维特征空间中投票的内容,其中4个维度为:
- 位置[x,y](有人称为平移) - 缩放 - 方向
而使用opencv可以轻松获得匹配的比例和方向:
cv::Keypoints.octave
cv::Keypoints.angle
我很难理解如何计算位置。
我发现了一个有趣的幻灯片,在这个幻灯片中,只有一个匹配项我们就能画出一个边界框:
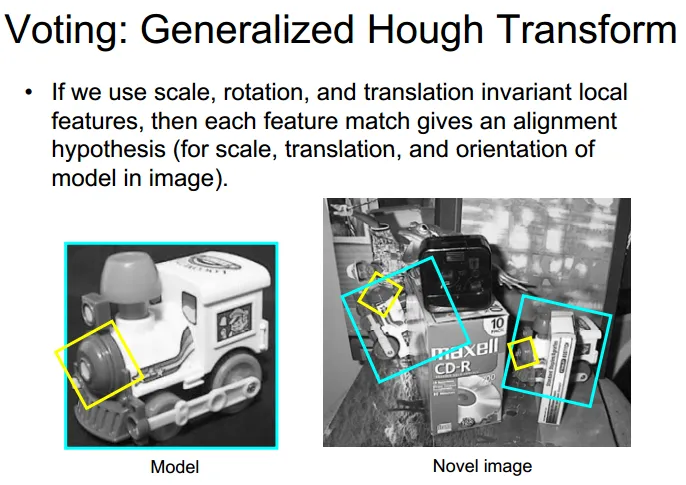
但我不明白如何仅使用一个匹配项就可以绘制该边界框。需要帮助吗?