在这种情况下,您可以使用卡尔曼滤波器,但是您的位置估计将严重依赖于加速度信号的精度。卡尔曼滤波器实际上用于多个信号的融合。因此,一个信号的误差可以通过另一个信号来补偿。理想情况下,您需要使用基于不同物理效应的传感器(例如IMU用于加速度,GPS用于位置,里程表用于速度)。
在本答案中,我将使用两个加速度传感器的读数(均为X方向)。其中一个传感器价格昂贵且精确。第二个传感器要便宜得多。因此,您将看到传感器精度对位置和速度估计的影响。
您已经提到了ZUPT方案。我只想添加一些注释:非常重要的是要很好地估计俯仰角,以消除X加速度中的重力分量。如果您使用Y和Z加速度,则需要俯仰和滚动角度。
让我们从建模开始。假设您只有X方向的加速度读数。因此,您的观测将如下所示:

现在,你需要定义最小的数据集,以完全描述系统在每个时间点上的状态。这将是系统状态。

测量和状态之间的映射由观测矩阵定义:


现在你需要描述系统动态。根据这些信息,过滤器将基于先前的状态预测一个新状态。

在我的情况下,dt=0.01秒。使用这个矩阵,滤波器将对加速度信号进行积分以估计速度和位置。
观测协方差R可以用传感器读数的方差来描述。在我的情况下,观测中只有一个信号,因此观测协方差等于X加速度的方差(该值可以根据传感器数据表计算)。
通过过渡协方差Q,您描述了系统噪声。矩阵值越小,系统噪声越小。滤波器会变得更加严格,估计会延迟。与新测量相比,系统过去的权重将更高。否则,滤波器将更加灵活,并对每个新测量做出强烈反应。
现在一切准备就绪,可以配置Pykalman。为了实时使用它,您必须使用filter_update函数。
from pykalman import KalmanFilter
import numpy as np
import matplotlib.pyplot as plt
load_data()
use_HP_signal = 1
if use_HP_signal:
AccX_Value = AccX_HP
AccX_Variance = 0.0007
else:
AccX_Value = AccX_LP
AccX_Variance = 0.0020
dt = 0.01
F = [[1, dt, 0.5*dt**2],
[0, 1, dt],
[0, 0, 1]]
H = [0, 0, 1]
Q = [[0.2, 0, 0],
[ 0, 0.1, 0],
[ 0, 0, 10e-4]]
R = AccX_Variance
X0 = [0,
0,
AccX_Value[0, 0]]
P0 = [[ 0, 0, 0],
[ 0, 0, 0],
[ 0, 0, AccX_Variance]]
n_timesteps = AccX_Value.shape[0]
n_dim_state = 3
filtered_state_means = np.zeros((n_timesteps, n_dim_state))
filtered_state_covariances = np.zeros((n_timesteps, n_dim_state, n_dim_state))
kf = KalmanFilter(transition_matrices = F,
observation_matrices = H,
transition_covariance = Q,
observation_covariance = R,
initial_state_mean = X0,
initial_state_covariance = P0)
for t in range(n_timesteps):
if t == 0:
filtered_state_means[t] = X0
filtered_state_covariances[t] = P0
else:
filtered_state_means[t], filtered_state_covariances[t] = (
kf.filter_update(
filtered_state_means[t-1],
filtered_state_covariances[t-1],
AccX_Value[t, 0]
)
)
f, axarr = plt.subplots(3, sharex=True)
axarr[0].plot(Time, AccX_Value, label="Input AccX")
axarr[0].plot(Time, filtered_state_means[:, 2], "r-", label="Estimated AccX")
axarr[0].set_title('Acceleration X')
axarr[0].grid()
axarr[0].legend()
axarr[0].set_ylim([-4, 4])
axarr[1].plot(Time, RefVelX, label="Reference VelX")
axarr[1].plot(Time, filtered_state_means[:, 1], "r-", label="Estimated VelX")
axarr[1].set_title('Velocity X')
axarr[1].grid()
axarr[1].legend()
axarr[1].set_ylim([-1, 20])
axarr[2].plot(Time, RefPosX, label="Reference PosX")
axarr[2].plot(Time, filtered_state_means[:, 0], "r-", label="Estimated PosX")
axarr[2].set_title('Position X')
axarr[2].grid()
axarr[2].legend()
axarr[2].set_ylim([-10, 1000])
plt.show()
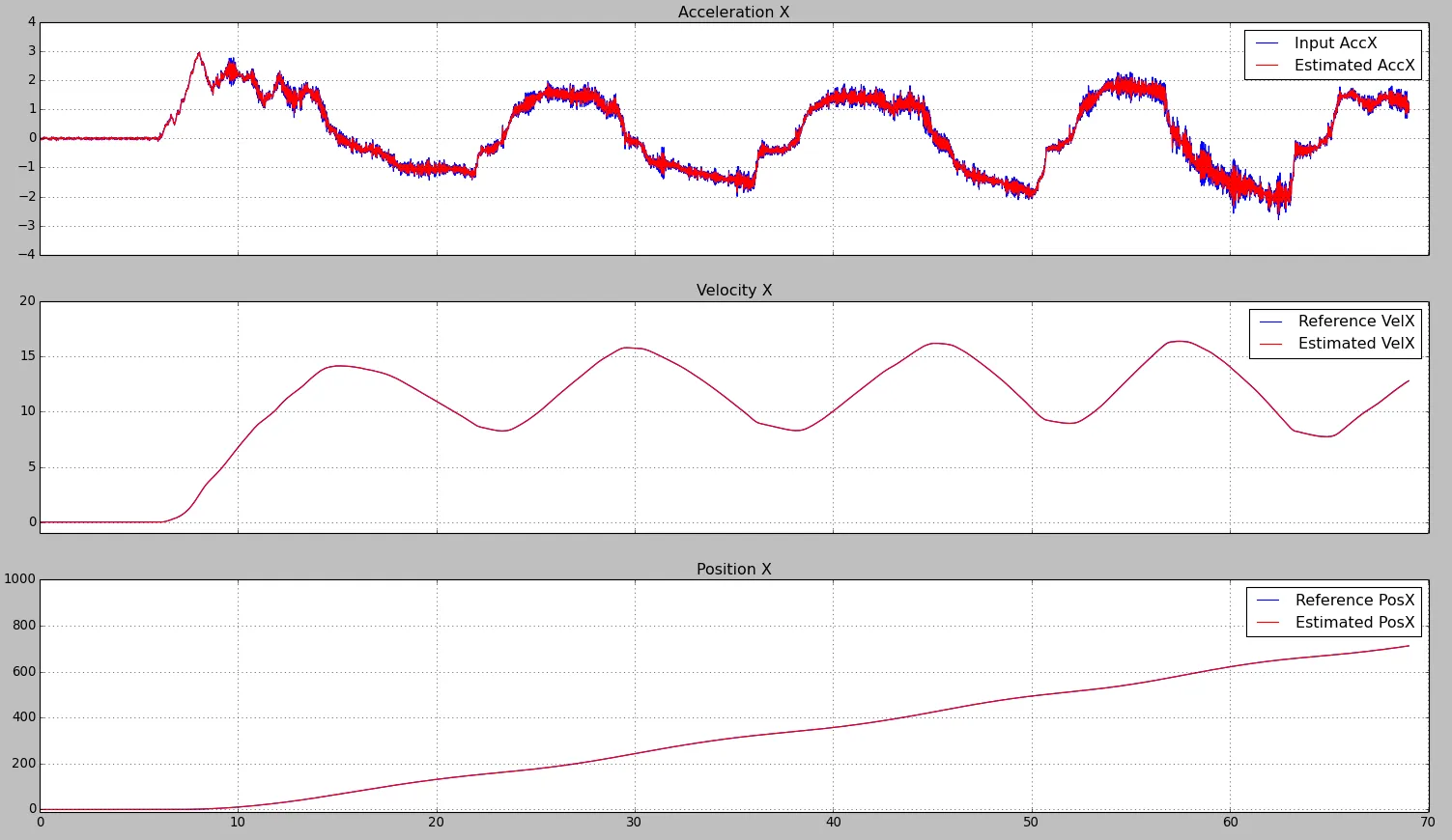
使用更好的IMU传感器时,估计的位置与实际位置完全相同:
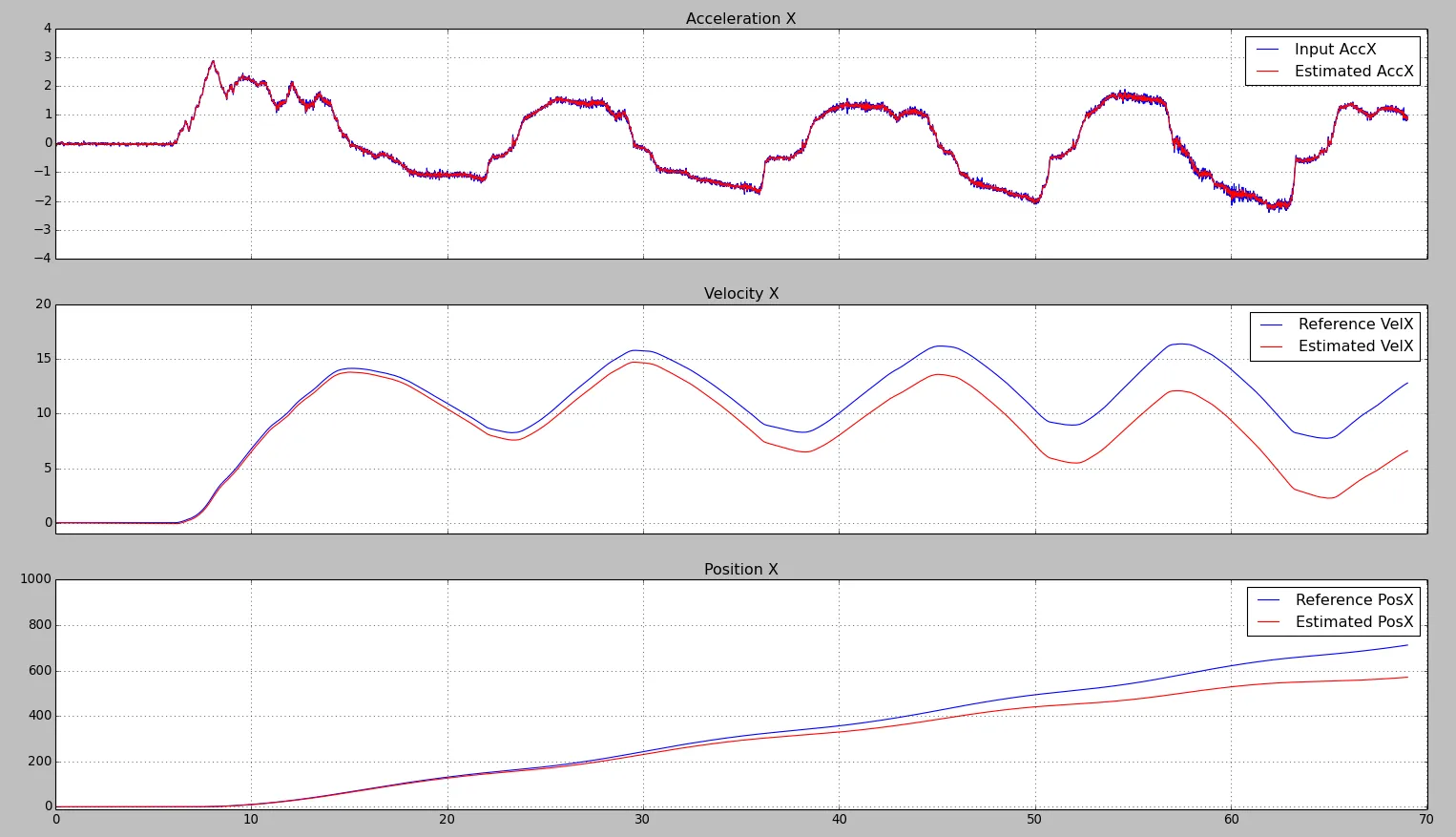
价格更便宜的传感器结果明显较差:
我希望能够帮助你。如果你有任何问题,我会尽力回答。
更新
如果你想尝试不同的数据,你可以很容易地生成它们(不幸的是,我没有原始数据了)。
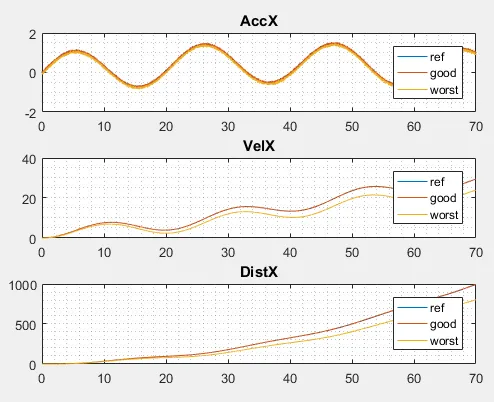
这里有一个简单的 Matlab 脚本,可以生成参考、良好和差劣的传感器组。
clear;
dt = 0.01;
t=0:dt:70;
accX_var_best = 0.0005;
accX_var_good = 0.0007;
accX_var_worst = 0.001;
accX_ref_noise = randn(size(t))*sqrt(accX_var_best);
accX_good_noise = randn(size(t))*sqrt(accX_var_good);
accX_worst_noise = randn(size(t))*sqrt(accX_var_worst);
accX_basesignal = sin(0.3*t) + 0.5*sin(0.04*t);
accX_ref = accX_basesignal + accX_ref_noise;
velX_ref = cumsum(accX_ref)*dt;
distX_ref = cumsum(velX_ref)*dt;
accX_good_offset = 0.001 + 0.0004*sin(0.05*t);
accX_good = accX_basesignal + accX_good_noise + accX_good_offset;
velX_good = cumsum(accX_good)*dt;
distX_good = cumsum(velX_good)*dt;
accX_worst_offset = -0.08 + 0.004*sin(0.07*t);
accX_worst = accX_basesignal + accX_worst_noise + accX_worst_offset;
velX_worst = cumsum(accX_worst)*dt;
distX_worst = cumsum(velX_worst)*dt;
subplot(3,1,1);
plot(t, accX_ref);
hold on;
plot(t, accX_good);
plot(t, accX_worst);
hold off;
grid minor;
legend('ref', 'good', 'worst');
title('AccX');
subplot(3,1,2);
plot(t, velX_ref);
hold on;
plot(t, velX_good);
plot(t, velX_worst);
hold off;
grid minor;
legend('ref', 'good', 'worst');
title('VelX');
subplot(3,1,3);
plot(t, distX_ref);
hold on;
plot(t, distX_good);
plot(t, distX_worst);
hold off;
grid minor;
legend('ref', 'good', 'worst');
title('DistX');
模拟数据看起来与上面的数据几乎相同。