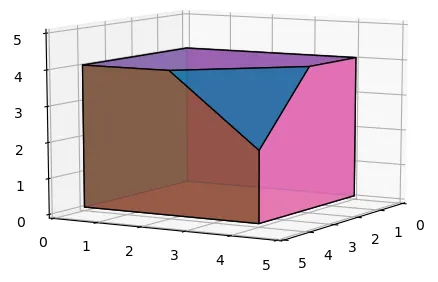
我很确定在matplotlib中没有原生的功能。不过,找到彼此属于的面并不特别困难。下面实现的基本思想是创建一个图形,其中每个节点是一个三角形。然后连接共面且相邻的三角形。最后,找到图形的连通组件以确定哪些三角形形成一个面。

import numpy as np
from sympy import Plane, Point3D
import networkx as nx
def simplify(triangles):
"""
Simplify an iterable of triangles such that adjacent and coplanar triangles form a single face.
Each triangle is a set of 3 points in 3D space.
"""
G = nx.Graph()
G.add_nodes_from(range(len(triangles)))
for ii, a in enumerate(triangles):
for jj, b in enumerate(triangles):
if (ii < jj):
if is_adjacent(a, b):
if is_coplanar(a, b, np.pi / 180.):
G.add_edge(ii,jj)
components = list(nx.connected_components(G))
simplified = [set(flatten(triangles[index] for index in component)) for component in components]
reordered = [reorder(face) for face in simplified]
return reordered
def is_adjacent(a, b):
return len(set(a) & set(b)) == 2
def is_coplanar(a, b, tolerance_in_radians=0):
a1, a2, a3 = a
b1, b2, b3 = b
plane_a = Plane(Point3D(a1), Point3D(a2), Point3D(a3))
plane_b = Plane(Point3D(b1), Point3D(b2), Point3D(b3))
if not tolerance_in_radians:
return plane_a.is_coplanar(plane_b)
else:
angle = plane_a.angle_between(plane_b).evalf()
angle %= np.pi
return (angle - tolerance_in_radians <= 0.) or \
((np.pi - angle) - tolerance_in_radians <= 0.)
flatten = lambda l: [item for sublist in l for item in sublist]
def reorder(vertices):
"""
Reorder nodes such that the resulting path corresponds to the "hull" of the set of points.
Note:
-----
Not tested on edge cases, and likely to break.
Probably only works for convex shapes.
"""
if len(vertices) <= 3:
return vertices
else:
reordered = [vertices.pop()]
vertices = list(vertices)
while len(vertices) > 1:
idx = np.argmin(get_distance(reordered[-1], vertices))
v = vertices.pop(idx)
reordered.append(v)
reordered += vertices
return reordered
def get_distance(v1, v2):
v2 = np.array(list(v2))
difference = v2 - v1
ssd = np.sum(difference**2, axis=1)
return np.sqrt(ssd)
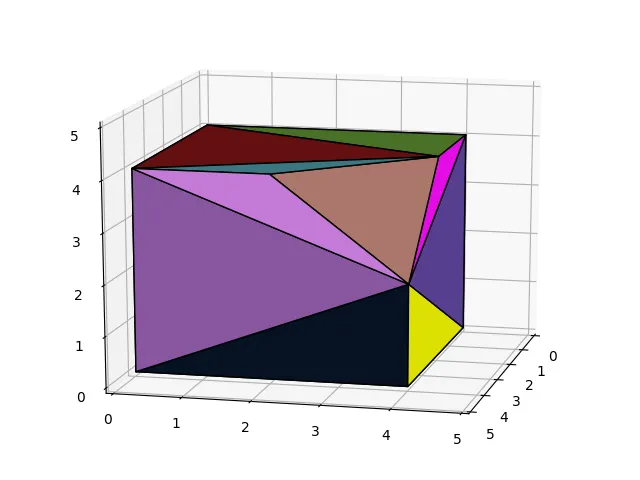
应用于您的示例:
from scipy.spatial import HalfspaceIntersection
from scipy.spatial import ConvexHull
import scipy as sp
import numpy as np
import matplotlib.pyplot as plt
import mpl_toolkits.mplot3d as a3
import matplotlib.colors as colors
w = np.array([1., 1., 1.])
halfspaces = np.array([
[1.*w[0], 1.*w[1], 1.*w[2], -10 ],
[ 1., 0., 0., -4],
[ 0., 1., 0., -4],
[ 0., 0., 1., -4],
[-1., 0., 0., 0],
[ 0., -1., 0., 0],
[ 0., 0., -1., 0]
])
feasible_point = np.array([0.1, 0.1, 0.1])
hs = HalfspaceIntersection(halfspaces, feasible_point)
verts = hs.intersections
hull = ConvexHull(verts)
faces = hull.simplices
ax = a3.Axes3D(plt.figure())
ax.dist=10
ax.azim=30
ax.elev=10
ax.set_xlim([0,5])
ax.set_ylim([0,5])
ax.set_zlim([0,5])
triangles = []
for s in faces:
sq = [
(verts[s[0], 0], verts[s[0], 1], verts[s[0], 2]),
(verts[s[1], 0], verts[s[1], 1], verts[s[1], 2]),
(verts[s[2], 0], verts[s[2], 1], verts[s[2], 2])
]
triangles.append(sq)
new_faces = simplify(triangles)
for sq in new_faces:
f = a3.art3d.Poly3DCollection([sq])
f.set_color(colors.rgb2hex(sp.rand(3)))
f.set_edgecolor('k')
f.set_alpha(0.1)
ax.add_collection3d(f)
注意
经过反思,函数reordered可能需要进行更多的工作。很确定这将会在奇怪/非凸形状上出现问题,而且我甚至不能百分之百确定它对于凸形状总是有效的。但是其余部分应该没问题。
nx,在第五个子循环迷失后就放弃了。 - ImportanceOfBeingErnestreorder按照现在的方式工作,因为它似乎相当武断。昨天考虑这个问题时,我想到了使用另一个convexhull,因为每个面都位于一个二维平面上,而convexhull会给出一个有序的二维点集。但这需要在三维点和二维点之间进行投影。这是你的意思吗? - ImportanceOfBeingErnestplot_trisurf,其中共面三角形被连接(这也可以解决这个情况,但适用于许多其他用例)。我怀疑没有人会付出任何努力,因为当前matplotlib 3D几乎死了,但如果有一个pull request实施这个功能,这可能会受到欢迎。 - ImportanceOfBeingErnest