我想用Matlab中的Runge Kutta 4方法解决一个包含三个微分方程的系统(不允许使用Ode45)。
我花了很长时间寻找,但我在网上找到的例子要么晦涩难懂,要么只是提供了一些泛泛而谈的解释而没有具体示例。我希望能够得到一个完整的示例或者一个可比较的问题的解决方案,以便于我进行构建。
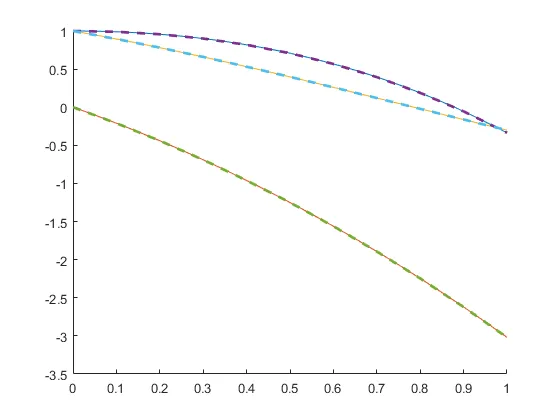
目前我的代码已经可以产生大部分分量的正确结果,保留了2位小数,这已经让我感到非常满意。
然而当步长减小时,误差变得非常巨大。我知道我创建的for循环并不完全正确,可能是我定义函数的方式有问题,但我相信如果针对for循环进行一些微小的更改,问题就能够得到解决,因为它在当前状态下已经相当好地解决了方程组。
clear all, close all, clc
%{
____________________TASK:______________________
Solve the system of differential equations below
in the interval 0<t<1, with stepsize h = 0.1.
x'= y x(0)=1
y'= -x-2e^t+1 y(0)=0 , where x=x(t), y=y(t), z=z(t)
z'= -x - e^t + 1 z(0)=1
THE EXACT SOLUTIONS for x y and z can be found in this pdf:
archives.math.utk.edu/ICTCM/VOL16/C029/paper.pdf
_______________________________________________
%}
h = 0.1;
t = 0:h:1
N = length(t);
%Defining the functions
x = zeros(N,1);%I am not entierly sure if x y z are supposed to be defined in this way.
y = zeros(N,1)
z = zeros(N,1)
f = @(t, x, y, z) -x-2*exp(t)+1;%Question: Do i need a function for x here as well??
g = @(t, x, y, z) -x - exp(t) + 1;
%Starting conditions
x(1) = 1;
y(1) = 0;
z(1) = 1;
for i = 1:(N-1)
K1 = h * ( y(i));%____I think z(i) is supposed to be here, but i dont know in what way.
L1 = h * f( t(i) , x(i) , y(i) , z(i));
M1 = h * g( t(i) , x(i) , y(i) , z(i));
K2 = h * (y(i) + 1/2*L1 + 1/2*M1);%____Again, z(i) should probably be here somewhere.
L2 = h * f(t(i) + 1/2*h, x(i)+1/2*K1 , y(i)+1/2*L1 , z(i)+1/2*M1);
M2 = h * g(t(i) + 1/2*h, x(i)+1/2*K1 , y(i)+1/2*L1 , z(i)+1/2*M1);
K3 = h * (y(i) + 1/2*L2 + 1/2*M2);%____z(i). Should it just be added, like "+z(i)" ?
L3 = h * f(t(i) + 1/2*h, x(i) + 1/2*K2 , y(i) + 1/2*L2 , z(i) + 1/2*M2);
M3 = h * g(t(i) + 1/2*h, x(i) + 1/2*K2 , y(i) + 1/2*L2 , z(i) + 1/2*M2);
K4 = h * (y(i) + L3 + M3);%_____z(i) ... ?
L4 = h * f( t(i)+h , x(i)+K3 , y(i)+L3, z(i)+M3);
M4 = h * g( t(i)+h , x(i)+K3 , y(i)+L3, z(i)+M3);
x(i+1) = x(i)+1/6*(K1+2*K2+2*K3+K4);
y(i+1) = y(i)+1/6*(L1+2*L2+2*L3+L4);
z(i+1) = z(i)+1/6*(M1+2*M2+2*M3+M4);
end
Answer_Matrix = [t' x y z]