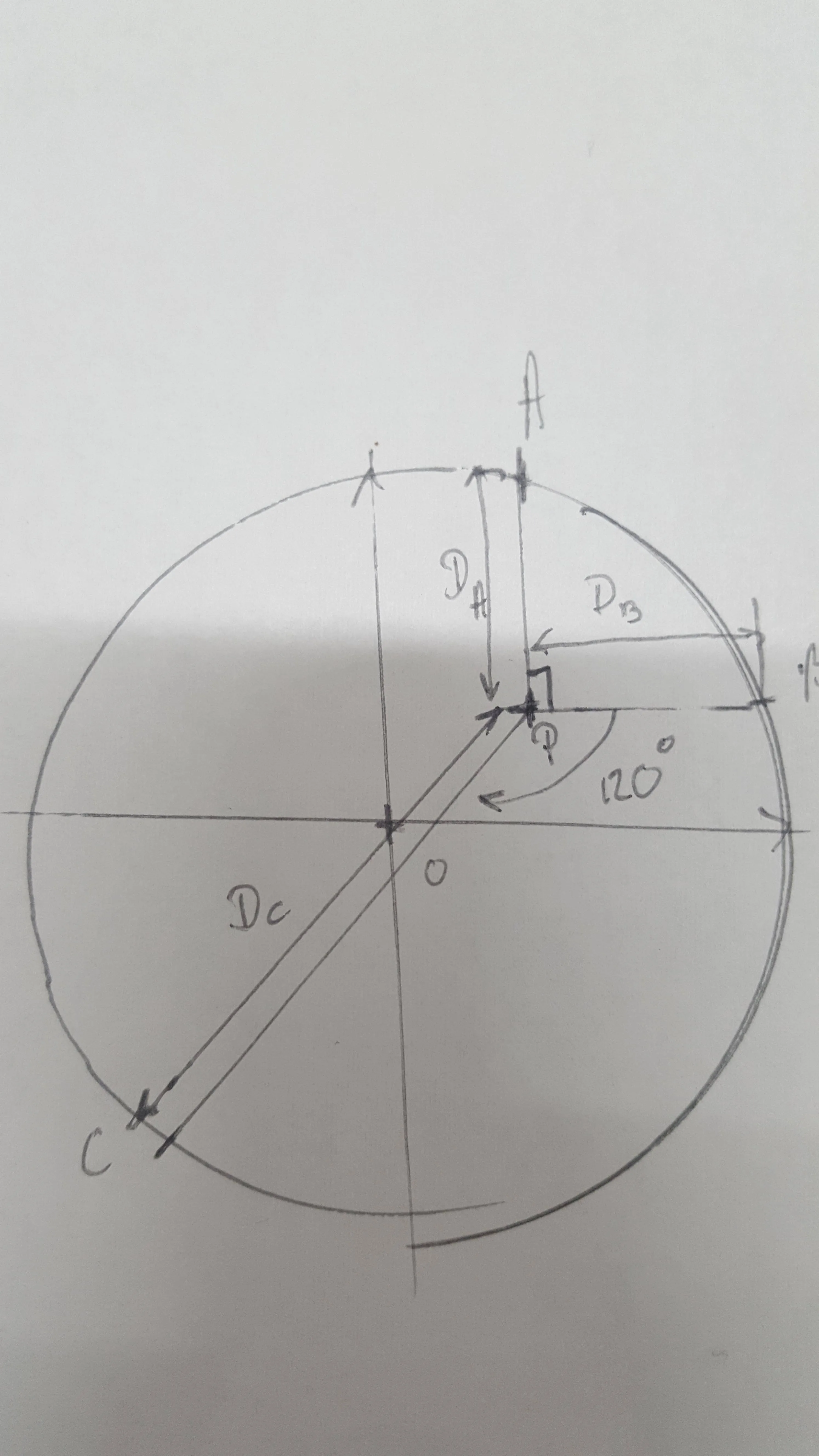
假设您已经了解X和Y。R是圆的半径。
|(X, Y + Da)| = R
|(X + Db, Y)| = R
|(X - cos(pi/3) * Dc, Y - cos(pi/6) * Dc)| = R
假设我们不知道半径 R,我们仍然可以说:
|(X, Y + Da)|^2 = |(X + Db, Y)|^2
=> X^2 + (Y+Da)^2 = (X+Db)^2 + Y^2
=> 2YDa + Da^2 = 2XDb + Db^2 (I)
将cos(pi/3)*Dc表示为c1,将cos(pi/6)*Dc表示为c2:
|(X, Y + Da)|^2 = |(X - c1, Y - c2)|^2
=> X^2 + Y^2 + 2YDa + Da^2 = X^2 - 2Xc1 + c1^2 + Y^2 - 2Yc2 + c2^2
=> 2YDa + Da^2 = - 2Xc1 + c1^2 - 2Yc2 + c2^2
=> Y = (-2Xc1 + c1^2 + c2^2 - Da^2) / 2(c2+Da) (II)
将 (II) 放回方程式 (I) 中,我们得到:
=> (-2Xc1 + c1^2 + c2^2 - Da^2) Da / (c2+Da) + Da^2 = 2XDb + Db^2
=> (-2Xc1 + c1^2 + c2^2 - Da^2) Da + Da^2 * (c2+Da) = 2XDb(c2+Da) + Db^2 * (c2+Da)
=> (-2Xc1 + c1^2 + c2^2) Da + Da^2 * c2 = 2XDb(c2+Da) + Db^2 * (c2+Da)
=> X = ((c1^2 + c2^2) Da + Da^2 * c2 - Db^2 * (c2+Da)) / (2Dbc2 + 2Db*Da + 2Dac1) (III)
通过计算(II),您可以了解X并得到Y。
您还可以进行一些简化,例如c1^2 + c2^2 = Dc^2
将其放入Python中(几乎是伪代码):
import math
def GetXYR(Da, Db, Dc):
c1 = math.cos(math.pi/3) * Dc
c2 = math.cos(math.pi/6) * Dc
X = ((c1**2 + c2**2) * Da + Da**2 * c2 - Db * Db * (c2 + Da)) / (2 * Db * c2 + 2 * Db * Da + 2 * Da * c1)
Y = (-2*X*c1 + c1**2 + c2**2 - Da**2) / (2*(c2+Da))
R = math.sqrt(X**2 + (Y+Da)**2)
R2 = math.sqrt(Y**2 + (X+Db)**2)
R3 = math.sqrt((X - math.cos(math.pi/3) * Dc)**2 + (Y - math.cos(math.pi/6) * Dc)**2)
return (X, Y, R, R2, R3)
(X, Y, R, R2, R3) = GetXYR(123.0, 114.0, 89.0)
print((X, Y, R, R2, R3))
我得到的结果(X,Y,R,R2,R3)=(-8.129166703588021,-16.205081335032794,107.1038654949096,107.10386549490958,107.1038654949096),如果Da和Db都比Dc长,则两个坐标可能都为负数,这似乎是合理的。
我通过三个方程计算半径以进行交叉检查,以确定我的计算是否有意义。它似乎满足我们在一开始设置的所有三个方程。