这是一个可能的方法:
- 将图像转换为灰度
- 自适应阈值以获取二进制图像
- 膨胀以增强轮廓
- 查找轮廓并提取ROI
- 进行拉普拉斯变化以检测模糊
我们首先将其转换为灰度并进行自适应阈值处理。
注意:保留html标签。
import cv2
import numpy as np
image = cv2.imread('1.jpg')
result = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
thresh = cv2.threshold(gray, 0, 255,cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
最初的回答:
接下来,我们进行膨胀以增强轮廓。
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5,5))
dilate = cv2.dilate(thresh, kernel, iterations=3)
现在我们要找到轮廓并提取每个ROI。我们使用Laplacian的变化来对这个ROI轮廓进行模糊检测。最初的回答为:
现在我们要找到轮廓并提取每个ROI。我们使用Laplacian的变化来对这个ROI轮廓进行模糊检测。
cv2.Laplacian(image, cv2.CV_64F).var()
基本上,我们将图像的单个通道与以下
3x3卷积核卷积,并取响应的标准差的平方。如果方差低于定义的阈值,则ROI模糊,否则ROI不模糊。请查看此
博客文章以获取更多详细信息。"最初的回答"
[0 1 0]
[1 -4 1]
[0 1 0]
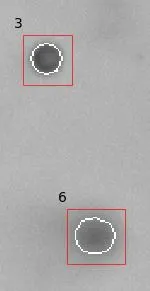
这是结果
ROI编号:1,价值:27.655757845590053
ROI编号:2,价值:7.385658155007905
(注:ROI即投资回报率)
ROI_num = 0
for c in cnts:
x,y,w,h = cv2.boundingRect(c)
ROI = image[y:y+h, x:x+w]
value = cv2.Laplacian(ROI, cv2.CV_64F).var()
cv2.rectangle(result, (x, y), (x + w, y + h), (36,255,12), 2)
cv2.putText(result, "{0:.2f}".format(value), (x,y - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (36,255,12), 2)
cv2.imshow("ROI_{}".format(ROI_num), ROI)
ROI_num += 1
print('ROI_Number: {}, Value: {}'.format(ROI_num, value))
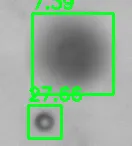
以下是另一张图片的结果:

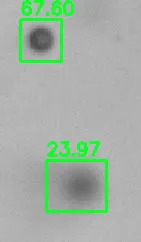
ROI_Number: 1, Value: 23.96665214233842
ROI_Number: 2, Value: 67.59560601952461
完整代码
import cv2
import numpy as np
image = cv2.imread('1.jpg')
result = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
thresh = cv2.threshold(gray, 0, 255,cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)[1]
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5,5))
dilate = cv2.dilate(thresh, kernel, iterations=3)
cnts = cv2.findContours(dilate, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
ROI_num = 0
for c in cnts:
x,y,w,h = cv2.boundingRect(c)
ROI = image[y:y+h, x:x+w]
value = cv2.Laplacian(ROI, cv2.CV_64F).var()
cv2.rectangle(result, (x, y), (x + w, y + h), (36,255,12), 2)
cv2.putText(result, "{0:.2f}".format(value), (x,y - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (36,255,12), 2)
cv2.imshow("ROI_{}".format(ROI_num), ROI)
ROI_num += 1
print('ROI_Number: {}, Value: {}'.format(ROI_num, value))
cv2.imshow('thresh', thresh)
cv2.imshow('dilate', dilate)
cv2.imshow('result', result)
cv2.waitKey(0)
 带有边缘的图像:
带有边缘的图像: