我试图理解并完成从 3D 场景描述(如 VRML)渲染简单 2D 图像所需的基本数学计算。是否有一个好的例子展示了所需的步骤,例如模型变换(从物体坐标到世界坐标),视图变换(从世界坐标到视图坐标),计算用于光照的顶点法线,裁剪,计算在视锥体内的对象的屏幕坐标以及创建 2D 投影来计算具有颜色的各个像素。
数学计算一个简单的图形管道
7
- Hans Sperker
6
你需要什么样的示例?是一个为显式场景执行所有这些步骤的示例吗?还是在一个明确的编程框架中?或者是像你发布的那些步骤列表一样的示例? - MvG
我正在寻找一个明确的场景示例,展示所有计算并解释数学。我想要理解渲染的数学步骤 :-) - Hans Sperker
POV光线追踪器是开源的。 - Felix Castor
@FelixCastor - 感谢您的回复,但我正在寻找数学计算和示例,而不是软件 :-) - Hans Sperker
1这是针对机器人的,但它使用了同质变换矩阵的相同原理。几何变换第98页及以后。可能会有用。 - Felix Castor
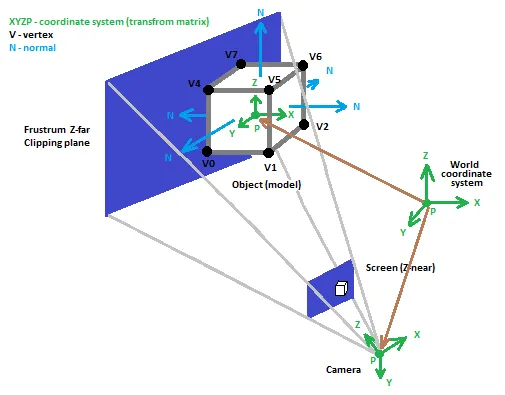
@jstr 给我的回答添加了图片。 - Spektre
2个回答
14
我习惯于使用OpenGL风格的渲染数学,因此我坚持使用它(所有的渲染几乎都使用相同的数学)
首先解释一些术语:
- 变换矩阵
表示3D空间中的坐标系
double m[16]; // it is 4x4 matrix stored as 1 dimensional array for speed
m[0]=xx; m[4]=yx; m[ 8]=zx; m[12]=x0;
m[1]=xy; m[5]=yy; m[ 9]=zy; m[13]=y0;
m[2]=xz; m[6]=yz; m[10]=zz; m[14]=z0;
m[3]= 0; m[7]= 0; m[11]= 0; m[15]= 1;
其中:
X(xx,xy,xz)是GCS(全局坐标系)中X轴的单位向量Y(yx,yy,yz)是GCS中Y轴的单位向量Z(zx,zy,zz)是GCS中Z轴的单位向量P(x0,y0,z0)是在GCS中表示的坐标系的原点
变换矩阵用于在GCS和LCS(本地坐标系)之间转换坐标
- GCS
->LCS:Al = Ag * m; - GCS
<-LCS:Ag = Al * (m^-1); Al(x,y,z,w = 1)是LCS中的3D点...在齐次坐标下Ag(x,y,z,w = 1)是GCS中的3D点...在齐次坐标下
添加齐次坐标w=1,以便我们可以将3D向量乘以4x4矩阵
m转换矩阵m^-1逆转换矩阵
在大多数情况下,m正交,这意味着X,Y,Z向量相互垂直且具有单位大小,这可用于在旋转、平移等操作后恢复矩阵的准确性...
更多信息请参见了解4x4齐次变换矩阵
- 渲染矩阵
通常使用以下矩阵:
model- 表示实际渲染对象的坐标系view- 表示相机坐标系统(Z轴是视图方向)modelview- 模型和视图相乘的结果normal- 与modelview相同,但用于法线向量计算时x0,y0,z0=0texture- 操纵纹理坐标以实现纹理动画和效果,通常为单位矩阵projection- 表示相机视图的投影(透视,正交等),不应包括任何旋转或平移,它更像相机传感器校准(否则雾化和其他效果将失败...)
- 渲染数学
要呈现3D场景,您需要像绘制2D纹理三角形之类的2D呈现例程。渲染会将3D场景数据转换为2D并呈现出来。还有更多的技术,但最常见的是使用边界模型表示 + 边界呈现(仅表面)。通过投影(正交或透视)和Z缓冲区或Z排序来完成3D->2D转换。
- Z缓冲区很容易且本地化在现今计算机图形硬件中
- Z排序由CPU执行,因此速度较慢且需要额外的内存,但对于正确的透明表面渲染是必要的。
因此,流水线是这样的:
- 从模型获取实际渲染数据
- 顶点
v - 法向量
n - 纹理坐标
t - 颜色,雾坐标等...
- 将其转换为适当的空间
v = projection * view * model * v...相机空间+投影n = normal * n...全局空间t = texture * t...纹理空间
- 将数据剪辑到屏幕上
这一步不是必要的,但可以提高速度并且通常在这里进行面剔除。如果呈现的“三角形”的法向量相反,则忽略该多边形绕序规则。
屏幕渲染只使用v.x,v.y坐标,而v.z用于z-buffer测试/值,透视投影需要进行透视除法。
v.x/=v.z,vy/=v.z
Z-buffer的工作原理如下: Z-buffer (zed)是与屏幕(scr)大小(分辨率)相同的2D数组。任何像素scr[y][x]仅在if (zed[y][x]>=z)时呈现,此时scr[y][x]=color; zed[y][x]=z; if条件可以不同(可更改)。
如果使用三角形或更高级别的基元进行渲染,则将得到的2D基元转换为像素,这个过程称为光栅化,例如:
以下是其外观:
[注]
变换矩阵是可乘的,因此如果您需要通过M矩阵转换N点,则可以创建单个matrix = m1*m2*...mM并仅通过此结果的matrix转换N点以提高速度。有时会使用3x3变换矩阵+平移向量代替4x4矩阵。在某些情况下,这样更快,但您不能很容易地将多个变换相乘。对于变换矩阵操作,请查找基本操作,例如旋转或平移,还有一些用于LCS内部旋转的矩阵,这些对于人类控制输入更合适,但这些不是渲染器(如OpenGL或DirectX)的本土矩阵。(因为它们使用逆矩阵)
现在所有上述内容都是用于标准多边形渲染(对象表面边界表示)。还有其他渲染器,如体积渲染或(背部)光线追踪器和混合方法。场景也可以具有任意维度,而不仅仅是3D。这里有关于这些主题的相关问答:
- Spektre
0
你可以查看书籍《计算机图形学原理与实践-第三版》Hughes等人的第15章。该章节推导了射线投射和光栅化算法,然后构建了软件光线追踪器、软件光栅化器和硬件加速光栅化渲染器的完整源代码。
- Alessandro Jacopson
网页内容由stack overflow 提供, 点击上面的可以查看英文原文,
原文链接
原文链接